
Contrôle par Tomographie avec CIVA
Le module CT offre la même interface et les mêmes capacités que le Module RT en termes de :
- Pièces
- Sources (rayons X, Gamma ou hautes énergies)
- Détecteurs numériques
- Défauts
- Options de calcul : simulation des rayonnements directs et diffusés
Exemples de simulations
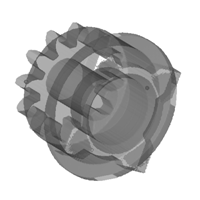
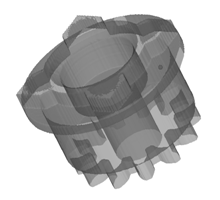
Reconstruction CT obtenues avec CIVA
Points spécifiques
Les points spécifiques au module CT sont :
- Le positionnement
- Le déplacement tomographique
- La reconstruction 3D
- L’import de données expérimentales
Positionnement
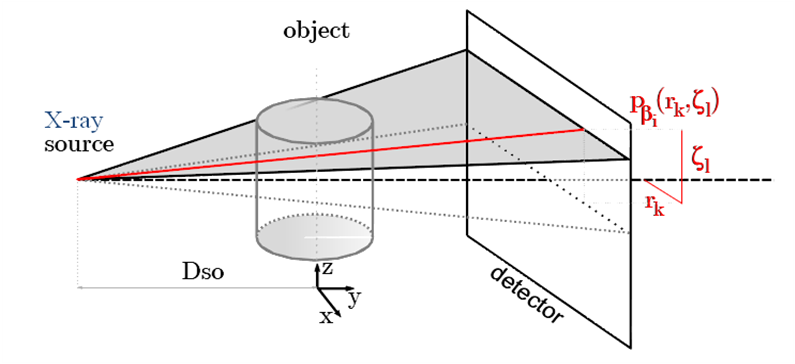
Une option de positionnement permet à l’utilisateur de définir le système de positionnement {détecteur-source}.
L’utilisateur peut désormais saisir la distance source-axe et détecteur-axe de façon semi-automatique.
Une option de correction de désalignement complète les options de positionnement (utile notamment pour l’import de données expérimentales). Il est possible de définir un décalage de la source et / ou du détecteur pour corriger un désalignement par rapport à la pièce à inspecter.
Déplacement Tomographique
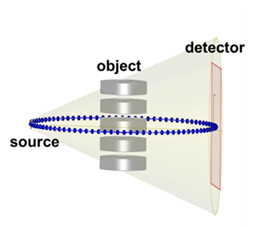
Comme la pièce est un objet fixe dans CIVA, le couple source-détecteur pivote autour de la pièce.
Différents déplacements tomographiques peuvent être modélisés :
- Un déplacement circulaire pour lequel l’utilisateur définit le nombre de position et le pas entre chaque position,
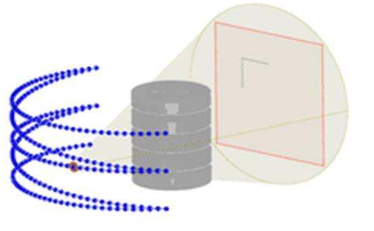
- Un déplacement hélicoïdal pour lequel l’utilisateur définit la longueur de déplacement, le nombre de tours, le nombre de positions par tour et l’angle maximum.
- Un déplacement arbitraire plus complexe (par exemple des trajectoires robotiques)
- Un scan linéaire de la source peut aussi être effectué en association avec des détecteurs linéaires. Cela aide à réduire les artefacts dus à la divergence de la source et améliore les reconstructions CT grâce à une meilleure qualité des différentes projections.
Un nombre arbitraire de positions peut être défini. CIVA lance automatiquement la simulation RT pour toutes les positions demandées.
Résultats
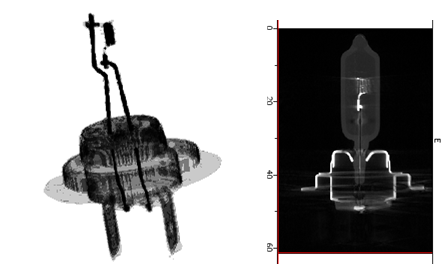
Résultats pour chaque projection
Les données correspondant aux coupes sont générées pour chaque position et les résultats correspondants peuvent être affichés. Ces résultats sont identiques à ceux du module RT et dépendent du détecteur et des options de calcul. Tous les outils d’analyse de CIVA RT sont également disponibles dans CIVA Tomographie (CT).
Import de données CT
CIVA permet l’import de résultats expérimentaux depuis des données d’acquisition. Différents formats d’acquisition sont disponibles. Si le format que vous utilisez est incompatible avec l’outil d’import de CIVA, il est possible de demander l’intégration de ce format via des plugins (développements spécifiques).
Reconstruction 3D
Une fois que les données sont acquises, elles doivent être traitées en utilisant un algorithme de reconstruction tomographique, qui produit une série d’images en coupes transversales.
Les algorithmes utilisés dans la version actuelle de CIVA sont l’algorithme FDK (Feldkamp, Davis et Kress) pour les déplacements circulaires et hélicoïdaux et PIXTV pour le déplacement circulaire, et SART pour les trajectoires complexes.
- L’algorithme FDK (Feldkamp, Davis and Kress) est un algorithme de rétroprojection filtrée largement utilisé pour la reconstruction d’images tridimensionnelles.
- L’algorithme PIXTV est basé sur la théorie du « compressed sensing ». Il s’agit d’un algorithme de reconstruction itératif qui minimise la norme de variation totale (TV).
Les reconstructions avec l’algorithme FDK peuvent être parallélisées sur CPU et GPU Celles avec PixTV sont parallélisées sur GPU
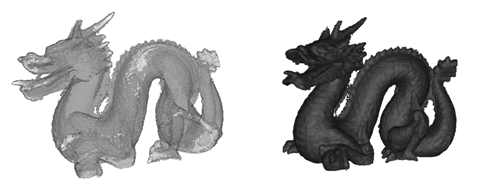
Une fois le traitement terminé, une nouvelle page d’analyse s’ouvre avec la pièce reconstruite en 3D. De nombreux outils sont alors disponibles pour représenter le composant reconstruit : affichage des iso surfaces, rendu volumique, etc.
Pour finir, l’utilisateur a la possibilité de voir les différentes coupes 2D et de déplacer les différents plans. Toutes les sections et la vue 3D reconstruite sont reliées entre elles : en déplaçant un curseur dans une vue, toutes les autres pages d’analyse sont actualisées en temps réel pour une meilleure interprétation des résultats.