
UT – Réflecteurs Trous à Fond Plat – Influence d’une désorientation du capteur
Sommaire
De la même manière que pour des Trous à Fond Plat (TFP) verticaux inspectés en mode L0° avec des capteurs de Ø19 mm à 2,25 MHz ou de Ø12,7 mm à 2,25 MHz et à 4,6 MHz, 3 expériences ont été menées avec une inclinaison du capteur de 0°, 1° et éventuellement 2° afin d’étudier l’influence de la désorientation du capteur. Les ondes L0°, L1° et L2° sont réfractées respectivement dans la pièce en ondes L0°, L4° et L8°.
CONFIGURATION
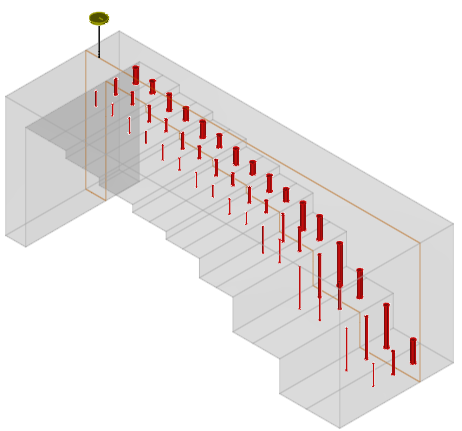
Les mesures expérimentales ont été réalisées sur une pièce plane contenant une série de TFP verticaux de diamètres Ø1 mm, 3 mm et 6 mm à différentes profondeurs (de 5 à 60 mm par pas de 5 mm puis à 80, 100, 125 et 150 mm). La pièce et les défauts sont représentés ci-dessous.
Pour chaque capteur, un balayage est réalisé à la surface de la pièce selon 2 directions. Pour chaque trou l’amplitude maximale de l’écho spéculaire est mesurée relativement à un trou d’étalonnage. Le modèle d’interaction utilisé est le modèle de Kirchhoff, celui-ci étant adapté aux échos spéculaires ou quasi-spéculaires.
Les capteurs en immersion suivants ont été étudiés avec une hauteur d’eau de 50 mm :
| Fréquence | Pastille | Défaut d’étalonnage | Profondeur d’étalonnage |
| 2,0 MHz | Ø19 mm | TFP de Ø2 mm | 24 mm |
| 4,6 MHz | Ø12,7 mm | TG de Ø2 mm | 8 mm |
| 5,0 MHz | Ø6,35 mm | TG de Ø2 mm | 24 mm |
RÉSULTATS
Capteur mono-élément à 2 MHz et de Ø19 mm
Pour le capteur en immersion de Ø19 mm à 2 MHz, l’inspection est réalisée avec une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 2 MHz, une bande passante de 60% et une phase de 0°.
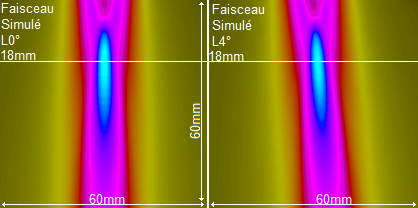
La profondeur focale acoustique est de 18 mm, déduite du faisceau simulé illustré ci-dessous.
Les résultats sont étalonnés par rapport à un TFP de Ø2 mm à 24 mm de profondeur inspecté en mode L0°.
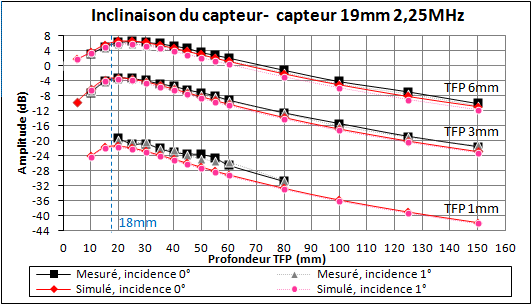
Un bon accord est observable avec généralement moins de 2 dB d’écart entre résultats expérimentaux et simulés.
Par ailleurs on remarque également que la désorientation du capteur n’a pas d’influence sur les amplitudes des échos.
Capteur mono-élément à 4,6 MHz de Ø12,7 mm
Pour le capteur en immersion de Ø12,7 mm à 4,6 MHz, l’inspection est réalisée avec une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 4,6 MHz, une bande passante de 65% et une phase de 220°.
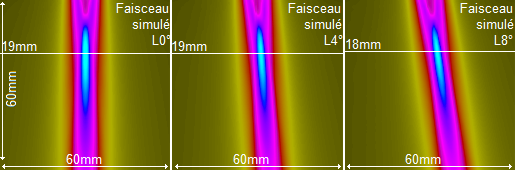
La profondeur focale acoustique est de 19 mm, déduite du faisceau simulé illustré ci-dessous. Elle varie très peu avec l’inclinaison du capteur.
Les résultats sont étalonnés par rapport à un TFP de Ø2 mm à 24 mm de profondeur inspecté en mode L0°.
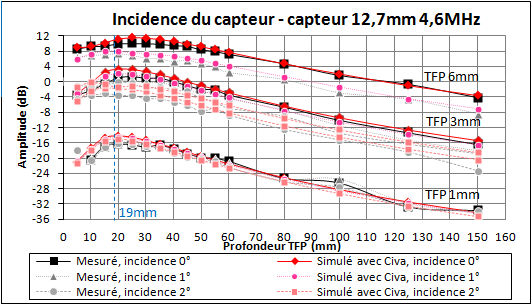
Un bon accord est observable avec généralement moins de 2 dB d’écart entre résultats expérimentaux et simulés.
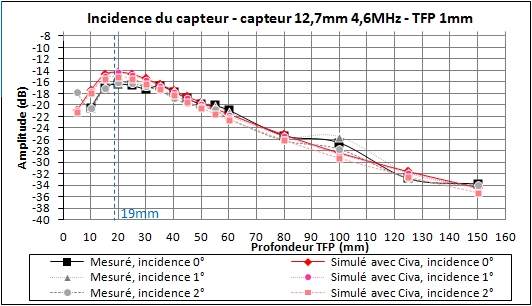
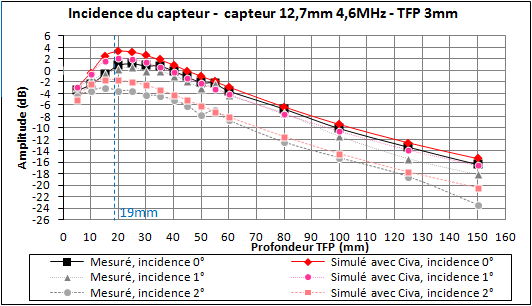
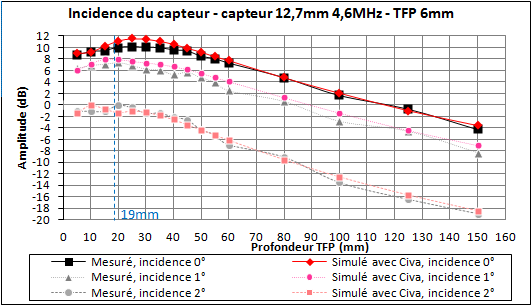
On remarque que la désorientation du capteur se traduit par une chute d’amplitude dépendant de la profondeur du défaut. Celle-ci est toujours d’autant plus importante que le TFP est large. Pour les TFP de Ø6 mm la chute d’amplitude est de 4 dB entre 0° et 1° et de 10 dB (petites profondeurs) à 14 dB (grandes profondeurs) entre 0° et 2°. Pour les TFP de Ø3 mm la chute d’amplitude est entre 1 dB et 2 dB entre 0° et 1° et de 2 dB (petites profondeurs) à 7 dB (grandes profondeurs) entre 0° et 2°. Les variations d’amplitude sont quasi-nulles pour les TFP de Ø1 mm.
Capteur mono-élément à 5,0 MHz de Ø6,35 mm
Pour le capteur en immersion de Ø6,35 mm à 5 MHz, l’inspection est réalisée avec une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 5 MHz, une bande passante de 70% et une phase de 255°.
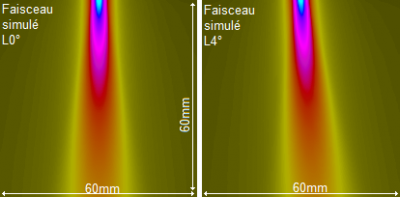
Le faisceau acoustique est illustré ci-dessous.
Les résultats sont étalonnés par rapport à un TFP de Ø2 mm à 8 mm de profondeur inspecté en mode L0°.
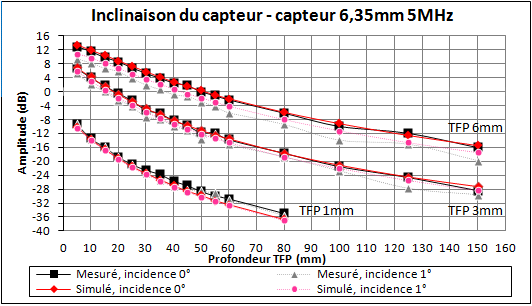
Un bon accord est observable avec moins de 2 dB d’écart entre résultats expérimentaux et simulés.
Par ailleurs on remarque également que la désorientation du capteur se traduit par une chute d’amplitude d’autant plus importante que le TFP est large. Contrairement au cas du capteur de Ø12,7 mm, la chute d’amplitude est indépendante de la profondeur du TFP. Entre 0° et 1°, la chute d’amplitude est de 4 dB pour les TFP de Ø6 mm, de 2 dB pour les TFP de Ø3 mm et quasi-nulle pour les TFP de Ø1 mm.
Continuer vers Courbes DGS
Retourner au menu Réflecteurs trous à fond plat
Retourner au menu Réflecteurs artificiels