
UT – Réflecteurs Trous à Fond Plat – TFP à différentes profondeurs
Sommaire
- CONFIGURATION
- RÉSULTATS
- Capteur T45° monoélément au contact à 2,0 MHz et de dimension 20x22 mm
- Capteur T45° monoélément au contact à 2,0 MHz et de Ø12,7 mm
- Capteur L45° mono-élément au contact à 2,25 MHz et de Ø12,7 mm
- Capteur L0° en immersion mono-élément à 2,25 MHz de Ø12,7 mm
- Capteur T45° mono-élément en immersion à 2,25 MHz et de Ø12,7 mm
- Capteur L0° en immersion mono-élément à 2,25 MHz de Ø19 mm
- Capteur L0° en immersion mono-élément à 4,6 MHz de Ø12,7 mm
- Capteur L45° en immersion mono-élément à 4,6 MHz de Ø12,7 mm
- Capteur L0° en immersion mono-élément à 4,6 MHz de Ø19 mm
- Capteur L0° en immersion mono-élément à 5,0 MHz de Ø6,35 mm
Vue globale (C=Contact ; I=Immersion):
| Capteur | 2,0 MHz 20*22 mm | 5,0 MHz Ø6,35 mm | 2,0 MHz Ø12,7 mm | 2,25 MHz Ø12,7 mm | 5,0 MHz Ø12,7 mm | 2,25 MHz Ø19 mm | 5,0 MHz Ø19 mm |
| L0° | I | I | I | I | I | ||
| L45° | C | I | |||||
| T45° | C | C | I |
CONFIGURATION
Des mesures expérimentales ont été réalisées en ondes L0°, L45° et T45° sur deux pièces de surface plane contenant une série de TFP de diamètres Ø1 mm, 3 mm et 6 mm à différentes profondeurs (de 5 à 60 mm par pas de 5 mm puis à 80, 100, 125 et 150 mm). Pour l’inspection en L0°, les TFP sont verticaux, tandis que pour l’étude en L45° et T45° ils sont inclinés de 45°. Les deux pièces et les défauts sont représentés ci-dessous.
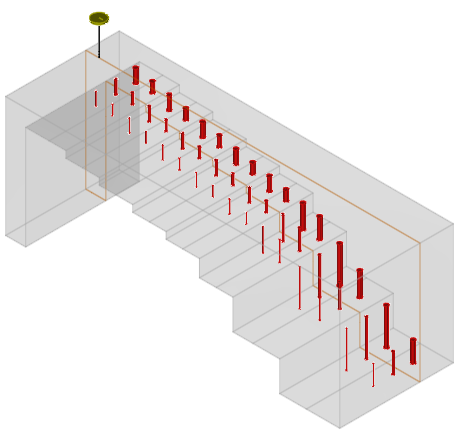
Pièce contenant des TFP verticaux pour l’inspection en L0°
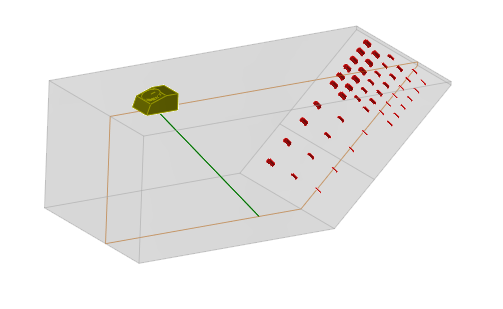
Pièce contenant des TFP inclinés à 45° pour l’inspection en L45° et T45°
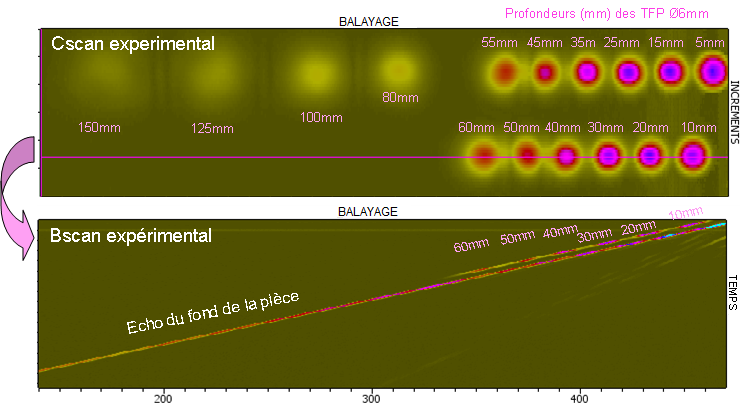
Pour chaque capteur une inspection est réalisée sur la surface du bloc et un C-scan est obtenu. Sur l’image C-scan suivante correspondant aux TFP de Ø6 mm, l’écho de fond a été masqué de manière à mettre en avant les échos de TFP. Cependant, sur l’image B-scan suivante extraite sur une ligne, on visualise les échos de TFP et l’écho de fond.
Pour chaque trou l’amplitude maximale de l’écho spéculaire est mesurée relativement à un trou d’étalonnage. Le modèle d’interaction utilisé est le modèle de Kirchhoff, celui-ci étant adapté aux échos spéculaires.
Les capteurs au contact suivants ont été étudiés :
| Fréquence | Pastille | Mode | Défaut d’étalonnage | Profondeur d’étalonnage |
| 2,0 MHz | 20×22 mm | T45° | TFP de Ø3 mm | 80 mm |
| Ø12,7 mm | T45° | TG de Ø2 mm | 20 mm | |
| 2,25 MHz | Ø12,7 mm | L45° | TG de Ø2 mm | 8 mm |
Les capteurs en immersion suivants ont été étudiés.
| Fréquence | Pastille | Mode | Défaut d’étalonnage | Profondeur d’étalonnage |
| 2,25 MHz | Ø12,7 mm | L0° | TG de Ø2 mm | 12 mm |
| T45° | TG de Ø2 mm | 12 mm | ||
| Ø19 mm | L0° | TG de Ø2 mm | 24 mm | |
| 4,6 MHz | Ø12,7 mm | L0° | TG de Ø2 mm | 24 mm |
| Ø12,7 mm | TG de Ø2 mm | 24 mm | ||
| Ø19 mm | L0° | TG de Ø2 mm | 60 mm | |
| 5,0 MHz | Ø6,35 mm | L0° | TG de Ø2 mm | 8 mm |
RÉSULTATS
L’amplitude maximale de l’écho spéculaire sur le TFP est estimée relativement à un réflecteur d’étalonnage. Les courbes DGS suivantes sont affichées pour tous les capteurs à partir de données simulées, mesurées ou issues de la littérature.
Les résultats présentent un bon accord dans la plupart des cas.
Capteur T45° monoélément au contact à 2,0 MHz et de dimension 20×22 mm
Pour le capteur au contact de 20×22 mm à 2 MHz, l’inspection est réalisée avec le mode T45°. Le signal d’entrée a une fréquence de 2 MHz, une bande passante de 41% et une phase de 75°.
La profondeur focale acoustique est de 53 mm, déduite du faisceau simulé illustré ci-dessous.
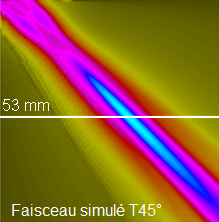
Les résultats sont étalonnés par rapport au TFP de Ø3 mm à 80 mm de profondeur.
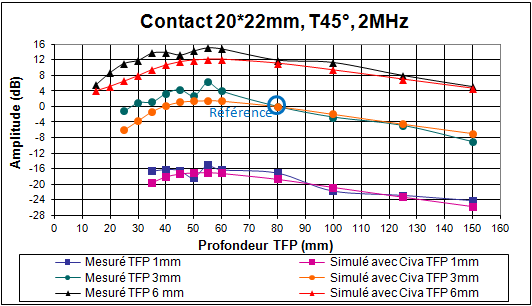
Un bon accord est observable avec généralement moins de 2 dB d’écart. Pour les trous petits et peu profonds, CIVA sous-estime légèrement l’amplitude des échos. Les courbes expérimentales représentant les amplitudes relatives des échos de TFP en fonction de leur profondeur sont moins lisses que les courbes simulées. Cette irrégularité est due à l’hétérogénéité du matériau.
Capteur T45° monoélément au contact à 2,0 MHz et de Ø12,7 mm
Pour le capteur au contact circulaire de Ø12,7 mm à 2 MHz, l’inspection est réalisée avec le mode T45°. Le signal d’entrée est l’opposé d’un écho spéculaire direct obtenu expérimentalement en ondes L45° sur un TFP de Ø3 mm incliné de 45° à 30 mm de profondeur.
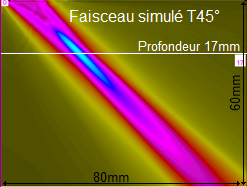
La profondeur focale acoustique est de 17 mm, déduite du faisceau simulé illustré ci-dessous.
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 20 mm de profondeur inspectés dans un autre bloc en ondes T45°.
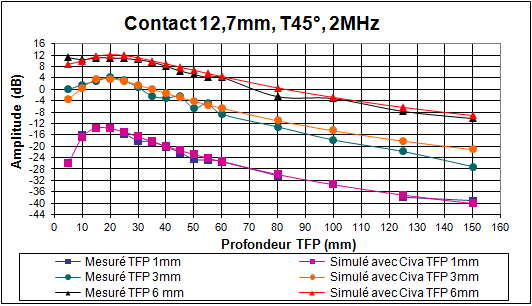
Bien que les courbes simulées par CIVA soient plus lisses (hétérogénéité de l’acier), un bon accord est observable entre simulation et mesure pour les TFP de Ø1 mm et de Ø6 mm. CIVA surestime l’écho des TFP de Ø3 mm profonds, de 2 dB à 60 mm à 6 dB à 150 mm.
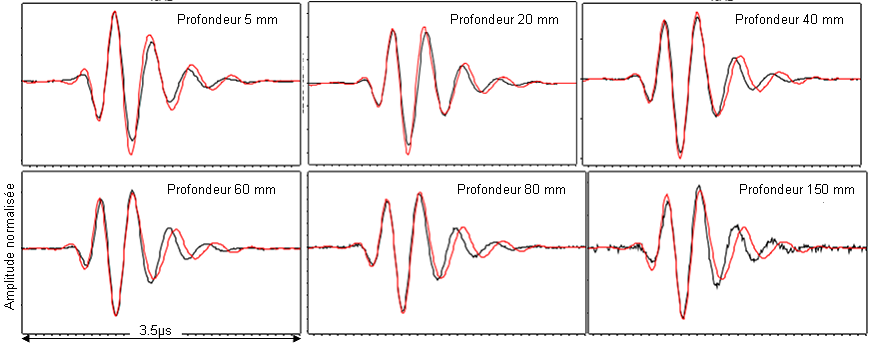
En plus du bon accord mesure / simulation obtenu pour les amplitudes, un très bon accord est obtenu pour les formes des échos.
Sur les courbes suivantes, les échos spéculaires directs simulés (rouge) et mesurés (noir) sont superposés pour plusieurs TFP de Ø6 mm à différentes profondeurs inspectés avec ce capteur T45° au contact de Ø12,7 mm à 2 MHz.
Capteur L45° mono-élément au contact à 2,25 MHz et de Ø12,7 mm
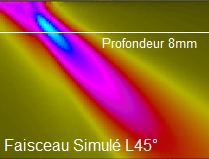
Pour le capteur au contact circulaire de Ø12,7 mm à 2,25 MHz, l’inspection est réalisée avec le mode L45°. Le signal d’entrée a une fréquence de 2,25 MHz, une bande passante de 50% et une phase de 280°.
La profondeur focale acoustique est de 8 mm, déduite du faisceau simulé illustré ci-dessous.
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 8 mm de profondeur inspecté dans un autre bloc en ondes T45°.
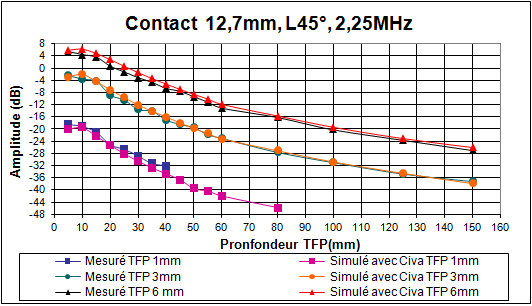
Les courbes affichent un bon accord entre simulation et expérience avec moins de 2 dB d’écart pour les 3 tailles de TFP. Les courbes expérimentales sont moins lisses que les courbes issues de la simulation à cause de l’hétérogénéité de l’acier.
Capteur L0° en immersion mono-élément à 2,25 MHz de Ø12,7 mm
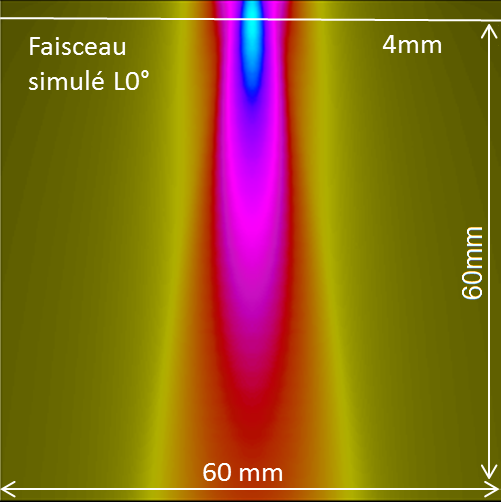
Pour le capteur en immersion circulaire de Ø12,7 mm à 2,25 MHz, l’inspection est réalisée avec le mode L0° pour une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 2,25 MHz, une bande passante de 60% et une phase de 0°.
La profondeur focale acoustique est de 4 mm, déduite du faisceau simulé illustré ci-dessous.
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 12 mm de profondeur inspecté dans un autre bloc en ondes L0°.
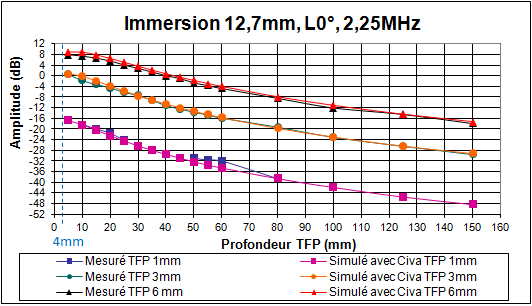
Les courbes affichent un bon accord entre simulation et expérience avec moins de 2 dB d’écart pour les 3 tailles de TFP.
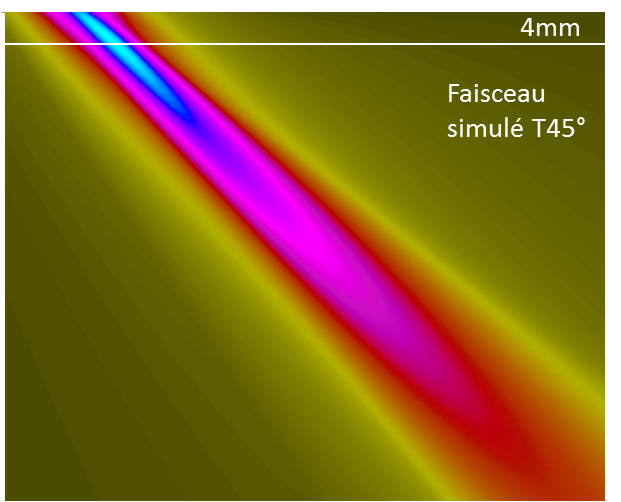
Capteur T45° mono-élément en immersion à 2,25 MHz et de Ø12,7 mm
Pour le capteur en immersion circulaire de Ø12,7 mm à 2,25 MHz, l’inspection est réalisée avec le mode T45° pour une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 2,25 MHz, une bande passante de 60% et une phase de 0°.
La profondeur focale acoustique est de 4 mm, déduite du faisceau simulé illustré ci-dessous.
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 12 mm de profondeur inspecté dans un autre bloc en ondes L0°.
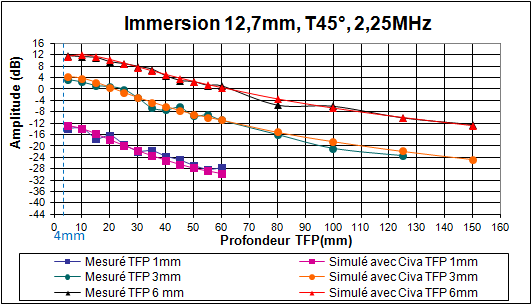
Les courbes affichent un bon accord entre simulation et expérience avec moins de 2 dB d’écart pour les 3 tailles de TFP. Les courbes expérimentales sont moins lisses que les courbes issues de la simulation, toujours à cause de l’hétérogénéité de l’acier.
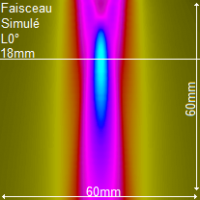
Capteur L0° en immersion mono-élément à 2,25 MHz de Ø19 mm
Pour le capteur en immersion circulaire de Ø19 mm à 2,25 MHz, l’inspection est réalisée avec le mode L0° pour une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 2,25 MHz, une bande passante de 60% et une phase de 0°.
La profondeur focale acoustique est de 18 mm, déduite du faisceau simulé illustré ci-dessous.
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 24 mm de profondeur inspecté dans un autre bloc en ondes L0°.
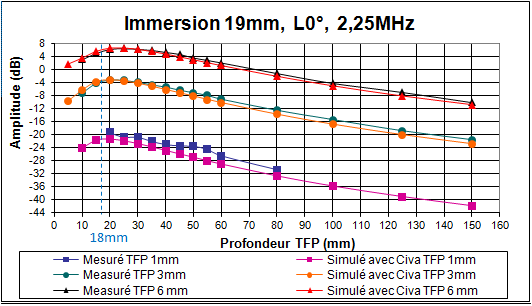
Un bon accord entre simulation et expérience s’observeavec moins de 2 dB d’écart pour les TFP de 3 et 6 mm. Pour les TFP de 1 mm, des écarts de 3 et 4 dB s’affichent pour des profondeurs supérieures à 50 mm.
Capteur L0° en immersion mono-élément à 4,6 MHz de Ø12,7 mm
La profondeur focale acoustique est de 19 mm, déduite du faisceau simulé illustré ci-dessous.
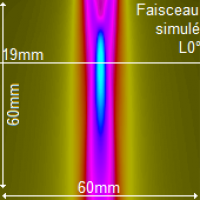
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 24 mm de profondeur inspecté dans un autre bloc en ondes L0°.
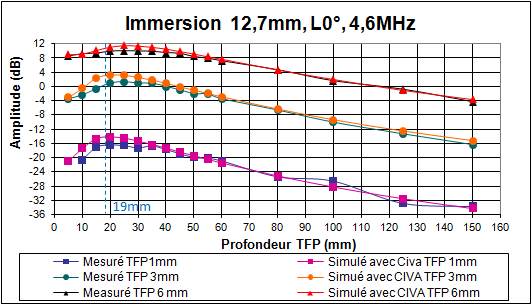
Pour des profondeurs supérieures à 20 mm, les courbes affichent un bon accord entre simulation et expérience avec moins de 2 dB d’écart pour les 3 tailles de TFP. Pour des profondeurs inférieures à la profondeur focale, les écarts atteignent 4 dB, ce qui peut s’expliquer par la limitation de champ proche des modèles de CIVA.
Capteur L45° en immersion mono-élément à 4,6 MHz de Ø12,7 mm
Pour le capteur en immersion circulaire de Ø12,7 mm à 4,6 MHz, l’inspection est réalisée avec le mode L45° pour une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 4,6 MHz, une bande passante de 65% et une phase de 220°.
La profondeur focale acoustique est de 10 mm, déduite du faisceau simulé illustré ci-dessous.
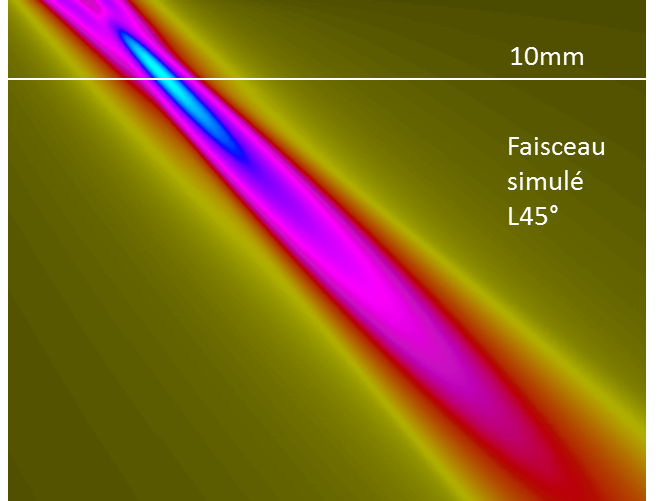
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 24 mm de profondeur inspecté dans un autre bloc en ondes L0°.
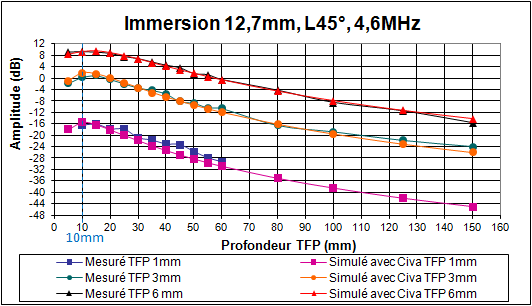
Les courbes affichent un bon accord entre simulation et expérience avec moins de 2 dB d’écart pour les 3 tailles de TFP sauf pour le TFP de 1 mm à 45 mm de profondeur pour lequel la courbe expérimentale est moins lisse que celle de simulation (hétérogénéité de l’acier), et l’écart atteint 4 dB.
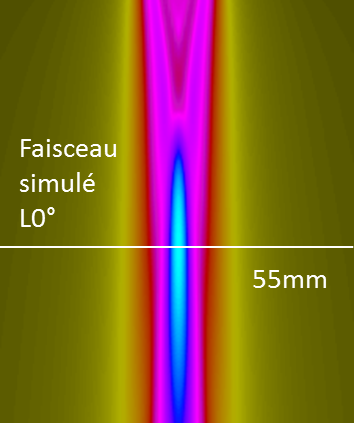
Capteur L0° en immersion mono-élément à 4,6 MHz de Ø19 mm
La profondeur focale acoustique est de 55 mm, déduite du faisceau simulé illustré ci-dessous.
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 60 mm de profondeur inspecté dans un autre bloc en ondes L0°.
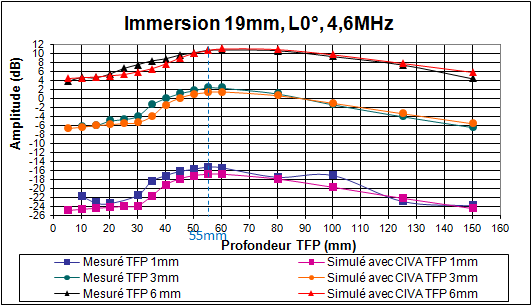
Les courbes des TFP de 3 et 6 mm affichent un bon accord entre simulation et expérience avec moins de 2 dB d’écart surtout pour des profondeurs supérieures à 45 mm. En revanche, pour les TFP de 1 mm, on observe des écarts atteignant 6 dB. Cet écart est probablement dû à la limitation « petits défauts » du modèle de Kirchhoff.
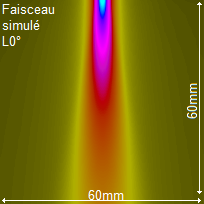
Capteur L0° en immersion mono-élément à 5,0 MHz de Ø6,35 mm
Pour le capteur en immersion circulaire de Ø6,35 mm à 5,0 MHz, l’inspection est réalisée avec le mode L0° pour une hauteur d’eau de 50 mm. Le signal d’entrée a une fréquence de 5,0 MHz, une bande passante de 70% et une phase de 255°.
Le faisceau acoustique est illustré ci-dessous.
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 8 mm de profondeur inspecté dans un autre bloc en ondes L0°.
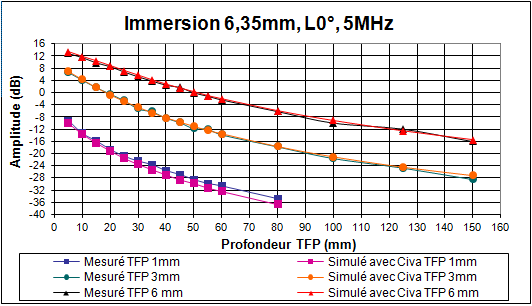
Les écarts entre simulations et expériences ne dépassant pas 2 dB, les résultats de CIVA sont en bon accord avec ceux obtenus expérimentalement.
Continuer vers Influence d’une désorientation du capteur
Retourner au menu Réflecteurs trous à fond plat
Retourner au menu Réflecteurs artificiels