
Inclusion dans l’eau – monoelement – Description des simulations
Sommaire
- Modèles et versions de CIVA utilisés
- Inclusions sphériques en acier
- Plan infini
- Trous génératrices et trous à fond plat
- Détermination des paramètres du signal d'entrée dans CIVA
- Détermination de la courbure de la pastille du capteur focalisé défini dans CIVA
- Configuration CIVA pour la simulation des catographies XZ ou YZ
Modèles et versions de CIVA utilisés
Inclusions sphériques en acier
Les modèles utilisés pour calculer les échos d’inclusions sphériques en acier placées dans de l’eau sont :
- SOV (Separation Of Variables) AVEC approximation onde plane: c’est le modèle SOV tel que disponible dans CIVA 2015a et les versions précédentes de CIVA.
- SOV (Separation Of Variables) SANS approximation onde plane pour le champ incident sur le défaut, appelé par la suite SOV_COMPLET : la possibilité de s’affranchir de l’approximation onde plane est une nouveauté de la version CIVA 2016.
- SPECULAIRE
Compte tenu des hypothèses et approximations liées à chaque modèle, chacun possède son propre domaine de validité. Les domaines de validité dépendent du rapport entre la fréquence centrale du capteur et la dimension de l’inclusion sphérique. Les bridages sont les suivants :
- pour SOV (avec ou sans approximation onde plane) : bridage pour k*rayon>20 où k est le nombre d’onde; un warning est affiché et le calcul ne se lance pas.
Le test est réalisé pour vL et/ou pour vT selon les modes demandés.
- pour SPECULAIRE : warning pour k*rayon<20, mais le calcul se lance quand même.
Dans le cas des configurations de validation qui nous intéressent ces bridages sont indiqués dans le tableau ci-dessous :
|
|
Ø 1mm |
Ø 2mm |
Ø 4mm |
Ø 6mm |
|
2.25MHZ |
|
|
|
|
|
SOV |
oui |
oui |
oui |
non |
|
SOV_COMPLET |
oui |
oui |
oui |
non |
|
SPECULAIRE |
non |
non |
non |
oui |
|
5MHZ |
|
|
|
|
|
SOV |
oui |
non |
non |
non |
|
SOV_COMPLET |
oui |
non |
non |
non |
|
SPECULAIRE |
non |
oui |
oui |
oui |
|
10MHZ |
|
|
|
|
|
SOV |
non |
non |
non |
non |
|
SOV_COMPLET |
non |
non |
non |
non |
|
SPECULAIRE |
oui |
oui |
oui |
oui |
Plan infini
Le modèle utilisé pour le calcul des échos du plan infini est le modèle SPECULAIRE.
Trous génératrices et trous à fond plat
Des TGs et des TFPs on été placés à différentes profondeurs dans les cales d’étalonnage.
Pour simuler les échos des TGs, les modèles SOV et SOV_COMPLET ont été utilisés. Il n’y a pas de bridage particulier sur ces réflecteurs pour les modèles SOV et SOV_COMPLET, même s’il est connu que ce modèle ne donne pas des réultats justes pour les grands TGs.
Pour simuler les échos des TFPs les modèles KIRCHHOFF et KIRCHHOFF_COMPLET ont été utilisés (le terme COMPLET signifiant comme pour SOV que l’on s’affranchit de l’approximation onde plane pour le champ incident sur le défaut, ce qui est une nouvelle possibilité de la version CIVA 2016). Il n’y a pas de bridage particulier pour l’utilisation de ces modèles pour des TFPs.
REMARQUE : Les précisions champ et écho utilisées pour réaliser certaines simulations ont parfois été montées jusqu’à 10 et 10 pour assurer la convergence des résultats.
Détermination des paramètres du signal d’entrée dans CIVA
Dans CIVA, les paramètres du signal d’entrée d’un capteur sont la fréquence centrale, la bande passante et la phase. Pour un capteur donné, ces paramètres sont les mêmes pour tous les modèles de calcul d’échos.
La fréquence centrale du signal d’entrée entrée dans l’interface est tout simplement sa fréquence nominale telle que donnée par le fabricant ou la spécification du traducteur.
L’ajustement de la fréquence centrale n’est pas réalisé dans cette étude de caractérisation expérimentale (contrairement aux études précédemment menées présentées dans certaines autres rubriques de noter site) parce qu’il peut dépendre du réflecteur de référence utilisé (TG ou TFP ou écho de surface …) et du modèle choisi pour calculer l’écho de référence (SOV, SOV_COMPLET, KIRCHHOFF, KIRCHHOFF_COMPLET, SPECULAIRE…). Cette dépendance est due au fait que les échos prédits pour les différents réflecteurs par les différents modèles de CIVA ne sont pas parfaitement « exacts » en raison des hypothèses et approximations de chaque modèle. De plus, les inexactitudes « se retrouvent » en quelque sorte dans la fréquence centrale obtenus par ajustement. Par ailleurs, la méthode dépend également de la fiabilité de l’acquisition de l’écho de référence.
Par exemple, si on prend le cas d’un capteur en immersion Ø19mm, 5MHz, la fréquence centrale de l’écho du signal d’entrée ajustée pour que les échos L0° mesuré et simulé avec SOV_COMPLET du TGØ2mm à 64mm de profondeur soient en bon accord est de 5.4MHz (Figure 11) au lieu de 4.6MHz obtenu en utilisant le modèle SOV (Figure 10).
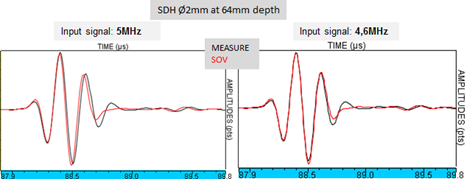
Figure 10 : Ajustement de la fréquence centrale du signal d’entrée CIVA de sorte que les A-scans mesuré et simulé avec SOV de l’écho d’un TG Ø2mm placé à 64mm de profondeur dans un bloc d’étalonnage en acier soient en bon accord. Amplitudes normalisées. Capteur immersion plan Ø19mm, 5MHz, L0°, hauteur d’eau 50mm.
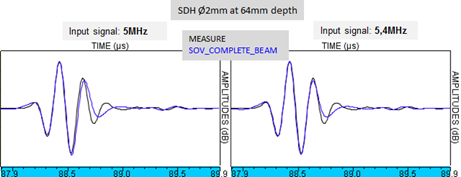
Figure 11 : Ajustement de la fréquence centrale du signal d’entrée CIVA de sorte que les A-scans mesuré et simulé avec SOV_COMPLET de l’écho d’un TG Ø2mm placé à 64mm de profondeur dans un bloc d’étalonnage en acier soient en bon accord. Amplitudes normalisées. Capteur immersion plan Ø19mm, 5MHz, L0°, hauteur d’eau 50mm.
Ainsi, pour éviter la dépendance de la fréquence centrale à la nature du réflecteur et au modèle de simulation la fréquence nominale du capteur renseignée dans CIVA n’est pas ajustée. L’effet d’une faible variation de cette fréquence centrale sur les résultats de simulation est étudié par la suite afin d’évaluer l’incertitude liée à ce paramètre d’entrée.
En revanche, les deux autres paramètres du signal, la bande passante et la phase, sont toujours déterminés par ajustement des formes temporelles des échos mesurés et simulés d’un réflecteur de référence pour lequel les prédictions de CIVA ont été validées.
Détermination de la courbure de la pastille du capteur focalisé défini dans CIVA
Le capteur focalisé utilisé pour cette étude est constitué d’une lentille dont on ne connait ni la courbure ni la vitesse de propagation des ondes L dans le matériau la constituant. Nous avons modélisé ce capteur par un capteur focalisé mis en forme (sans lentille) dont le rayon de courbure a été déterminé de sorte que la distance focale dans l’eau simulée avec CIVA soit celle indiquée par le fabriquant.
Configuration CIVA pour la simulation des catographies XZ ou YZ
Dans CIVA, pour simuler les cartographies des inclusions il faut définir une pièce dont le matériau est de type fluide (eau) dans laquelle on place les inclusions en acier.
De plus, le cas des cartographies XZ est particulier : CIVA permet de les simuler en utilisant une pièce CAO de géométrie plane (dont le matériau est fluide) et en choisissant le positionnement par centre de la pastille et le déplacement indiqué sur la Figure 12. Ce type ne cartographie ne peut être simulé en utilisant une pièce plane.
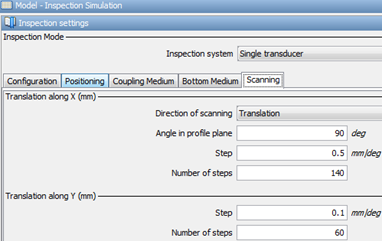
Figure 12 : Configuration du déplacement pour simuler les cartographies XZ ou YZ avec CIVA.
Les courbes amplitude/distance du plan infini sont obtenues en simulant l’écho de la surface d’une pièce CAO plane dans la configuration décrite sur la Figure 12.
Remarque : dans le cas du capteur focalisé (avec pastille mise en forme), la hauteur d’eau entrée dans CIVA correspond à la hauteur représentée sur la Figure 13. Elle est mesurée à partir du centre de la pastille.
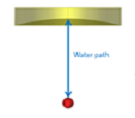
Figure 13 : Définition de la hauteur d’eau dans CIVA pour un capteur focalisé avec une pastille mise en forme.
Continuer vers Résultats avec le capteur 2.25 MHz
Retour vers Description des mesures
Retour vers Capteurs mono-élément