
Inclusion dans l’eau – multiéléments – Configurations avec lois de retards
Sommaire
Plusieurs ouvertures actives ont été évaluées (de 20, 32, 48 et 64 éléments). Pour chaque ouverture, une loi de retards a été paramétrée et calculée sous Multi2000 pour focaliser en L0° à 33mm de profondeur dans l’eau. Cette loi de retards a ensuite été injectée dans CIVA pour les simulations. Les dimensions correspondantes aux ouvertures évaluées sont les suivantes :
- Ouverture de 20 éléments : 11.9 x 10 mm²
- Ouverture de 32 éléments : 19.1 x 10 mm²
- Ouverture de 48 éléments : 28.7 x 10 mm²
- Ouverture de 64 éléments : 38.3 x 10 mm²
Référence pour les amplitudes lors des comparaisons mesure/CIVA
Comme pour les configurations sans lois de retards, une référence a été choisie pour chaque ouverture active pour le calcul des amplitudes relatives. Elle a été obtenue en comparant des résultats expérimentaux et de simulation de l’écho d’un TGØ2mm à faible profondeur dans le bloc d’étalonnage obtenus en faisant varier la hauteur d’eau. Aucune loi de retards n’a été paramétrée pour la référence. Le champ lointain étant localisé à une distance importante de la surface du
capteur, la comparaison des courbes échodynamiques a été faite sur 380mm (distance maximale permise par le banc de mesure).
En fonction de l’ouverture active, la configuration et le TG de référence suivant a été choisi :
- Ouverture 20 éléments : TG à profondeur 12mm, hauteur d’eau 151mm (il s’agit de la même référence que pour la configuration sans lois de retards)
- Ouverture 32 éléments : TG à profondeur 24mm, hauteur d’eau 201mm
- Ouverture 48 éléments : TG à profondeur 68mm, hauteur d’eau 261mm
- Ouverture 64 éléments : TG à profondeur 68mm, hauteur d’eau 261mm
La raison pour laquelle la profondeur du TG de référence augmente en fonction de l’ouverture est dûe au fait que les TGs à profondeur plus faible ne sont pas exploitables en raison d’un écho de surface très étendu dans le temps venant se mélanger à l’écho du TG.
La comparaison des courbes amplitude/distance obtenues est présentée en Figure 30. Elle montre une bonne prédiction de l’amplitude du TG pour toutes les ouvertures à 2dB près.
Remarque : Les amplitudes expérimentales apparaissent bruitées sur la figure. Il s’agit soit de signaux parasites provenant de la chaine d’acquisition, soit d’échos « fantômes » liés à la grande profondeur de numérisation qui se somment à l’écho utile. Certaines de ces indications ont été supprimées sur la figure, c’est la raison pour laquelle des zone « vides » apparaissent.
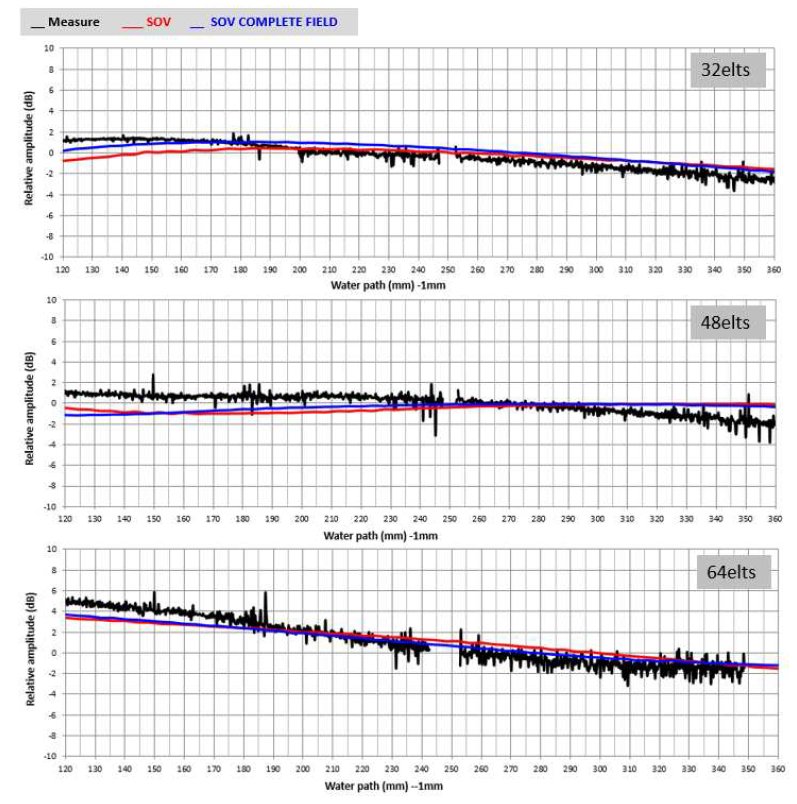
Figure 30 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET, TGØ2mm à 24mm et 68mm de profondeur dans le bloc d’étalonnage en acier ferritique. Capteur multiéléments 5MHz, ouvertures de 32, 48 et 64 éléments, focalisation à 33mm dans l’eau.
Champ du capteur dans l’eau en fonction de l’ouverture active
La Figure 31 présente le champ simulé émis par le capteur multiéléments dans l’eau avec un jeu de loi de retards permettant de focaliser à 33mm dans l’eau en L0°. Les lois de retards ont été calculées pour les 4 ouvertures actives : 20, 32, 48 et 64 éléments. Sous chaque cartographie de champ (de même dimension pour toutes les ouvertures : 10 x 60 mm) est représenté la courbe amplitude/distance extraite au centre de l’ouverture et, à droite de la cartographie, le profil dans le plan perpendiculaire à la distance correspondant au maximum d’amplitude.
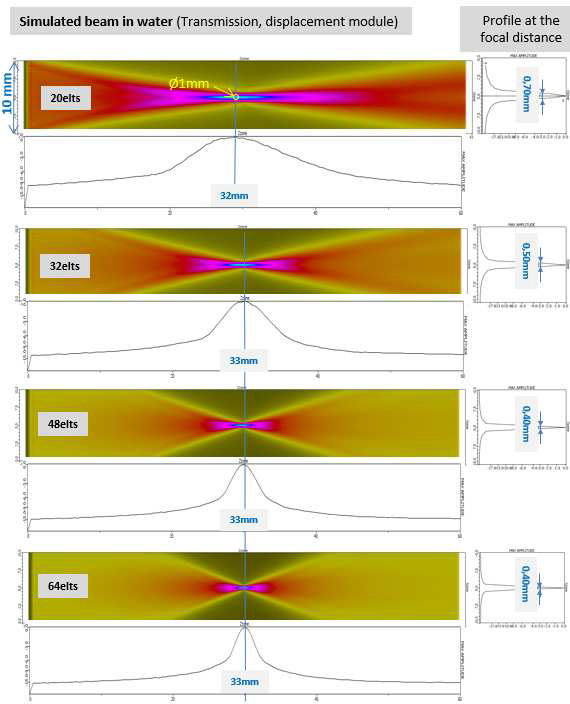
Figure 31 : Simulation avec CIVA du champ émis par le capteur dans l’eau avec une loi focale de 33mm dans l’eau pour 4 différentes ouvertures actives : 20, 32, 48 et 64 éléments. Capteur multiéléments, 5MHz.
La position des amplitudes maximales en fonction de l’ouverture active et la largeur de la tache focale à -3dB sont affichées sur le tableau 5.
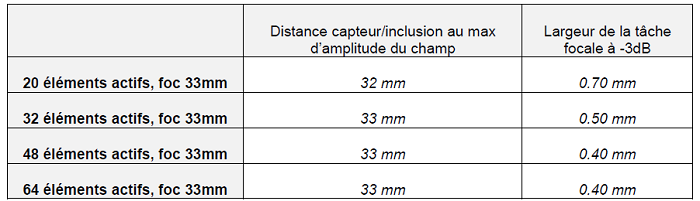
Tableau 5 : Distances capteur/inclusion correspondant au maximum d’amplitude du champ émis sur l’axe du capteur et largeur de la tache focale en fonction de l’ouverture active. Capteur multiéléments avec 20, 32, 48 et 64 éléments actifs, loi focale profondeur 33mm dans l’eau.
La Figure 32 montre l’exemple de profil de champ suivant le centre du capteur obtenu pour une ouverture de 32 éléments et une loi focale permettant de focaliser à 33mm dans l’eau en L0°. Des cartographies de champ à hauteur d’eau fixe dans le plan perpendiculaire ont également été calculées et sont présentées en bas de la figure.
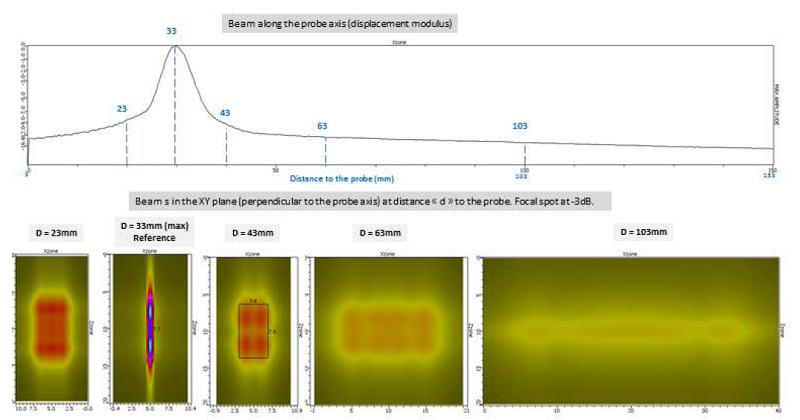
Figure 32: Simulation avec CIVA du champ émis par le capteur multiéléments dans l’eau. En haut profil du champ le long de l’axe du capteur montrant un maximum à 33mm de distance du capteur. En bas, cartographies (10mmx20mm, 20mmx20mm et 40mmx20mm) du champ dans des plans perpendiculaires à son axe à différentes distances du capteur. Amplitudes comparables (réf = amplitude maximale du champ (obtenue à D=33mm). Capteur multiéléments avec 32 éléments actifs, focalisation à 33mm dans l’eau, 5MHz.
Résultats obtenus pour l’inclusion en acier
Courbes amplitude/distance
Les comparaisons des courbes amplitude/distance expérimentales et simulées avec les trois modèles SOV, SOV-COMPLET et SPECULAIRE sont présentées pour 4 ouvertures actives (20 et 32 éléments sur la Figure 33; 48 et 64 éléments sur la Figure 34) et une loi focale permettant de focaliser à 33 mm dans l’eau.
Les écarts entre dmaxEXPERIMENTAL et dmaxCIVA sont indiqués sur le tableau 6.
Ouverture de 20 éléments :
Un bon accord est obtenu entre l’expérience et la simulation. La position du maximum de l’écho spéculaire ainsi que son amplitude relativement à l’écho du TG de référence sont bien prédites avec les 3 modèles. Une meilleure prédiction est obtenue avec les modèles « rayon » après la zone focale (les écarts maximums atteignent 2dB).
Ouverture de 32 et 48 éléments :
Nous observons également une bonne prédiction des 3 modèles sur l’évolution de l’amplitude et la position du maximum d’amplitude de l’écho spéculaire. Les écarts max sont de l’ordre de 2/3dB. Comme pour l’ouverture de 20 éléments, nous observons une meilleure prédiction avec les modèles SOV-COMPLET et SPECULAIRE après la zone focale. Il existe cependant après la zone focale une petite oscillation d’amplitude qui n’apparait pas sur l’expérience. Les écarts d’amplitude ne dépassent cependant pas les 2dB.
Ouverture de 64 éléments :
Ce cas de figure montre l’apport des modèles SOV-COMPLET et SPECULAIRE sur les prédictions de l’amplitude de l’écho d’inclusion en fonction de la hauteur d’eau. En effet, en dehors de la zone focale, les amplitudes simulées avec le modèle SOV ont tendance à être sous-estimées. Les écarts maximums observés entre l’expérience et les prédiction du modèle vont jusqu’à 5/6dB. Entre l’expérience et les prédictions des modèles SOV-COMPLET et SPECULAIRE, ces écarts sont inférieurs à 2dB.
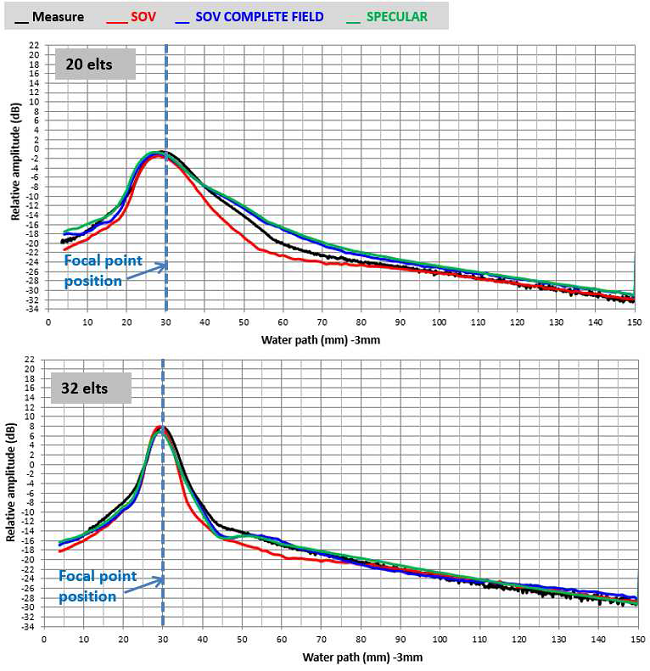
Figure 33: Comparaison des courbes amplitude/distance mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas des ouvertures de 20 et 32 éléments,focalisation à 33mm dans l’eau. Les traits verticaux correspondant à la position du point focal. Capteur multiéléments, 5MHz.
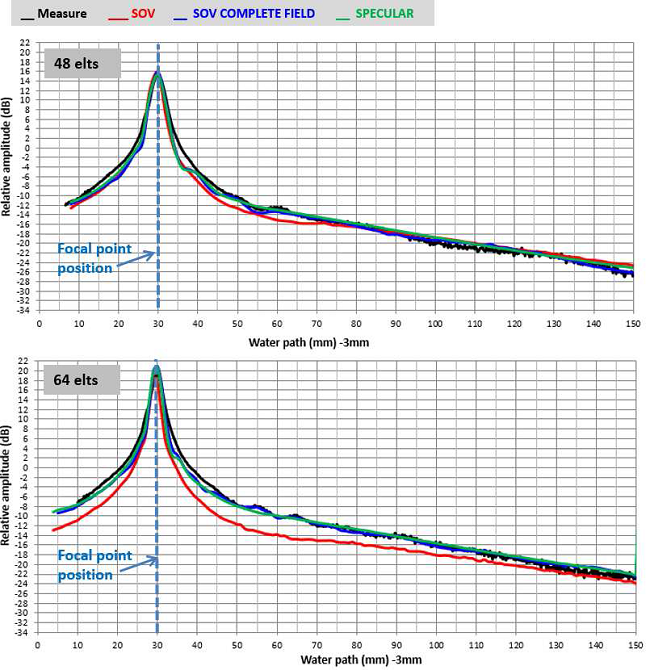
Figure 34: Comparaison des courbes amplitude/distance mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas des ouvertures de 48 et 64 éléments,focalisation à 33mm dans l’eau. Les traits verticaux correspondant à la position du point focal. Capteur multiéléments, 5MHz.
La distance « dmax » à laquelle l’amplitude de l’écho est maximale est très bien prédite avec tous les modèles et pour toutes les ouvertures. Les écarts n’excédent pas 1mm.
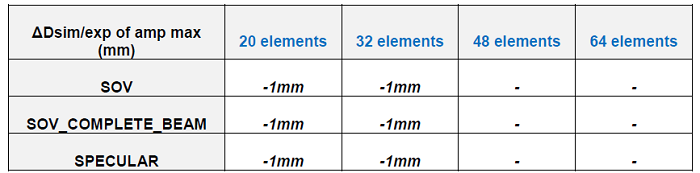
Tableau 6: Ecarts entre mesure/CIVA entre les distances capteur/inclusion du tableau précédent. Les nombres en caractères gras correspondent aux cas non bridés dans CIVA. Focalisation à 33mm de profondeur dans l’eau, capteur multiéléments, 5MHz.
Les A-scans des échos d’inclusion expérimentaux et simulés avec SOV et SOV-COMPLET sont représentés sur la Figure 35 pour deux distances entre le capteur et l’inclusion. Pour plus de clarté, seul le premier écho de bille (écho spéculaire) est présenté. D’autre part, les A-scans obtenus avec le modèle SPECULAIRE et SOV-COMPLET étant très semblables, seul le A-scan obtenu avec SOV_COMPLET est représenté.
La superposition des A-scans montrent une bonne prédiction de la forme des signaux échos sur les différents cas de figure. A hauteur d’eau de 103mm, le modèle SOV-COMPLET semble plus juste en fréquence et forme du signal par rapport au modèle SOV avec approximation d’onde plane.
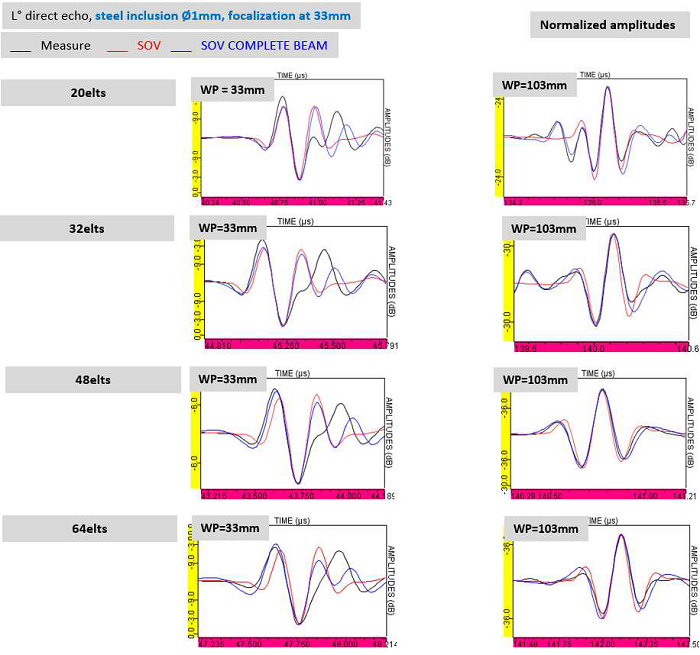
Figure 35: Comparaison des A-scans mesurés et simulés avec SOV et SOV-COMPLET sur une inclusion de Ø1mm. Focalisation à 33mm de profondeur dans l’eau, capteur multiéléments, 5MHz.
Cartographies dans le plan XY
Les courbes échodynamiques XY expérimentales et simulées avec les 3 modèles disponibles ont été extraites à la position du point focal dans l’eau (33mm) pour toutes les ouvertures actives. La Figure 36 correspond aux ouvertures de 20 et 32 éléments actifs et la Figure 37 aux ouvertures de 48 et 64 éléments actifs, suivant l’axe X.
Les courbes sont normalisées en amplitude (amplitude max = 0dB) afin de comparer les largeurs focales.
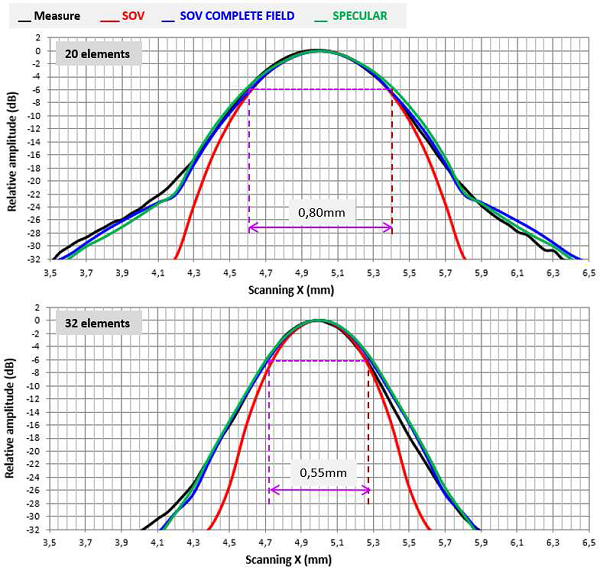
Figure 36: Comparaison des courbes échodynamiques expérimentales et simulées selon l’axe X avec SOV, SOV-COMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas des ouvertures de 20 et 32 éléments, focalisation à 33mm dans l’eau. Capteur multiéléments, 5MHz.
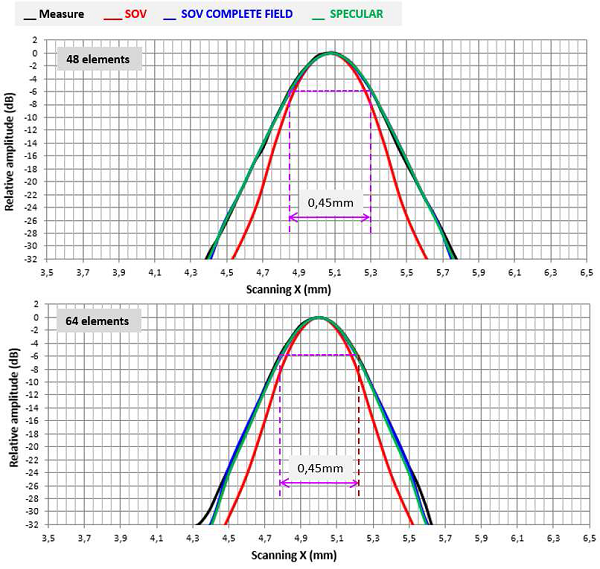
Figure 37: Comparaison des courbes échodynamiques expérimentales et simulées selon l’axe X avec SOV, SOV-COMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas des ouvertures de 48 et 64 éléments, focalisation à 33mm dans l’eau. Capteur multiéléments, 5MHz.
Les comparaisons expérience/simulations des courbes échodynamiques normalisées en amplitude suivant X montrent un bon accord pour les 3 modèles sur la prédiction de la largeur focale à -6dB (à +/- 0.05mm près).
Au-delà de cette zone à -6dB, on observe un fort désaccord entre l’expérience et les résultats obtenus avec le modèle SOV. Ce dernier sous-estime l’amplitude de l’écho d’inclusion. Cet écart est d’autant plus important que le nombre d’éléments est faible. Pour une ouverture de 20 éléments actifs, à 0.8mm du centre du capteur, les écarts s’élèvent à 12dB environ.
La comparaison des résultats expérimentaux avec les modèles SOV-COMPLET et SPECULAIRE montre une nette amélioration des prédictions pour les zones les plus éloignées du centre du capteur. En effet, les écarts s’élèvent à 2dB au maximum même pour un point d’observation situé à -32dB en dessous du maximum d’amplitude.
La Figure 38 montre un exemple de superposition des courbes échodynamiques expérimentales et simulées suivant l’axe Y, extraites à la hauteur d’eau de 33mm et une ouverture de 32 éléments actifs. La comparaison montre que les 3 modèles prédisent assez fidèlement les amplitudes. Les écarts max entre l’expérience et la simulation n’excèdent pas 2dB pour tous les modèles.
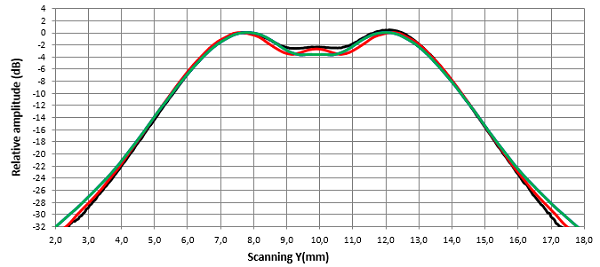
Figure 38: Comparaison des courbes échodynamiques expérimentales et simulées selon l’axe Y avec SOV, SOV-COMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas de l’ouverture de 32 éléments, focalisation à 33mm dans l’eau. Capteur multiéléments, 5MHz.
Les écarts entre les largeurs de tache focale simulées et expérimentales à -6dB en fonction de l’ouverture active sont affichées sur le Tableau 7.
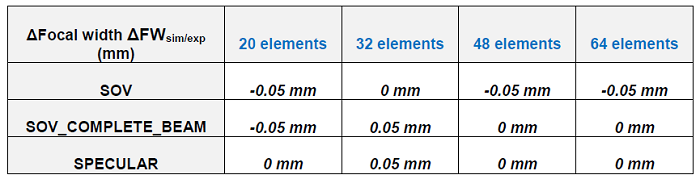
Tableau 7: Ecarts (en mm) entre les simulations et la mesure pour les taches focales à -6dB suivant X aux distances auxquelles l’amplitude de la courbe amplitude/distance est maximale. Résultats de simulations avec les 3 modèles. Focalisation à 33mm de profondeur dans l’eau, capteur multiéléments, 5MHz.
Continuer vers conclusion
Retour vers résultats des configurations sans lois de retards
Retour vers Capteur multi-élément