
Inclusion dans l’eau – multiéléments – Description des simulations
Sommaire
Modèles et versions de CIVA utilisés
Plusieurs versions « développement » de CIVA ont été utilisées pour les simulations suite à des corrections ou à des optimisations faites sur les nouveaux modèles évalués pour les capteurs multiéléments. La dernière version utilisée est la « DEV » du 06 novembre 2015.
Inclusions sphériques en acier
Les modèles utilisés pour calculer les échos de l’inclusion sphérique en acier placée dans de l’eau sont :
- SOV (Separation Of Variables)
- SOV_COMPLET (Separation Of Variables sans approximation onde plane pour le champ incident sur le défaut). Ce nouveau modèle n’étant pas présent dans la version commerciale courante, cela explique pourquoi nous avons utilisé une version developement de CIVA.
- SPECULAIRE
Ces différents modèles sont décrits ici.
Les hypothèses et approximations liées à chaque modèle entraînent un domaine de validité différent pour chacun. Ainsi, dans CIVA, suivant le rapport entre la fréquence centrale du capteur et la dimension de l’inclusion sphérique les trois modèles cités ci-dessus sont ou ne sont pas autorisés. Les bridages de CIVA 2015a sont les suivants :
- pour SOV : bridage pour k*rayon>20 où k est le nombre d’onde. Le test est réalisé pour vL et/ou pour vT selon les modes demandés.
- pour SPECULAIRE : warning pour k*rayon<20, mais le calcul se lance quand même.
- pour SOV_COMPLET: mêmes warning que pour SOV mais pas de bridage, le calcul se lance quand même. Cela est temporaire, les éventuels warnings ne sont ni décidés ni implémentés pour l’instant.
Dans le cas des configurations de validation avec le capteur multiéléments à 5MHz, seul un warning apparait avec le modèle SPECULAIRE.
Pour les simulations réalisables dans CIVA 2015a (échos SOV et SPECULAIRE), nous avons vérifié que les résultats de CIVA 2015a sont identiques à ceux de la version « DEV ».
Plan infini
Les modèles utilisés pour le calcul des échos du plan infini sont le modèle SPECULAIRE, KIRCHHOFF et KIRCHHOFF_COMPLET.
Trous Génératrice (TGs)
Ces réflecteurs placés à différentes profondeurs dans les cales d’étalonnage en acier ferritique ont été utilisés pour étalonner les capteurs.
Pour simuler les échos des TGs les modèles SOV et SOV_COMPLET ont été utilisés. Dans la version CIVA 2015a, les bridages pour ces réflecteurs sont :
- Pour SOV: pas de bridage sur les grands TGs même si il est connu que ce modèle est moins fiable pour ces derniers.
- Pour SOV_COMPLET: idem SOV
REMARQUE : Les précisions champ et écho utilisées pour réaliser les simulations ont parfois été montées à 10 et 10 pour assurer la convergence des résultats.
Paramètres d’entrée de CIVA
Détermination des paramètres du signal d’entrée dans CIVA
A la différence des précédentes études de validation réalisées, l’ajustement de la fréquence centrale n’est plus réalisé parce qu’il dépend du réflecteur de référence utilisé (TG ou TFP ou écho de surface …) et du modèle choisi pour calculer l’écho de référence (SOV, SOV_COMPLET, KIRCHHOFF, KIRCHHOFF_COMPLET, SPECULAIRE…). Cette dépendance est due au fait que les échos prédits pour les différents réflecteurs par les différents modèles de CIVA reposent sur des approximations différentes en raison des hypothèses de chaque modèle. Ainsi, il n’est pas possible de définir une fréquence centrale obtenue par ajustement commune à l’ensemble des modèles. De plus la méthode dépend également de la fiabilité de l’acquisition de l’écho de référence. C’est pourquoi, la fréquence centrale du signal d’entrée dans CIVA correspond à la fréquence nominale (5MHz).
Les deux autres paramètres du signal, la bande passante et la phase, sont toujours déterminés par ajustement des formes temporelles des échos mesurés et simulés d’un réflecteur de référence pour lequel les prédictions de CIVA ont été validées. Le réflecteur de référence choisi pour ce capteur est TG de diamètre Ø=2mm dans un bloc d’étalonnage en acier ferritique homogène. Cet écho de référence a été mesuré pour une hauteur d’eau de 150mm.
La bande passante et la phase du signal d’entrée ainsi déterminées sont :
- Bande passante = 65%
- Phase = 330°
La Figure 10 montre un exemple de superposition des signaux écho expérimental et simulé avec le modèle SOV_COMPLET du TGØ2mm à 12mm de profondeur.
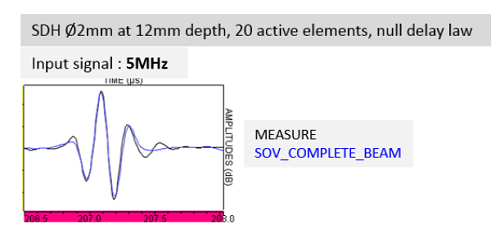
Figure 10 : Ajustement du signal d’entrée CIVA de sorte que les A-scans mesuré et simulé avec SOV_COMPLET de l’écho d’un TG Ø2mm placé à 12mm de profondeur dans un bloc d’étalonnage en acier soient en bon accord. Amplitudes normalisées. Capteur Multiéléments 5MHz, 20 éléments actifs, lois de retards nulle, L0°, hauteur d’eau 150mm
Paramètres de l’eau
La vitesse dans l’eau a été mesurée expérimentalement en utilisant les rebonds successifs d’un écho de surface sur un plan infini.
- vLeau = 1483 ms-1
L’atténuation dans l’eau a été prise en compte. La valeur du coefficient d’atténuation des ondes L dans l’eau à la fréquence de 5 MHz entrée dans CIVA est :
- coeffAtténuation = 0.005 dB/mm
Cette valeur issue de de la littérature a été validée dans lors de la validation de la réponse d’inclusions dans l’eau détecté avec un capteur monoélément (ici) en comparant les résultats de mesure et de simulation de l’écho du TGØ2mm en faisant varier la hauteur d’eau.
Lois de retards
Les lois de retards utilisées en simulation sont les mêmes que celles calculées et appliquées dans le système d’acquisition. Le paramétrage a été effectué en définissant une pièce en eau dans le modèle et le traducteur a été positionné à une faible distance de la pièce. Le point focal est à 30mm dans la pièce en eau avec le traducteur positionné à 3mm de la pièce. La profondeur focale est donc en réalité de 33mm. Un exemple de loi de retards calculée pour une configuration avec 32 éléments actifs et une focalisation à 33mm est présenté Figure 11.
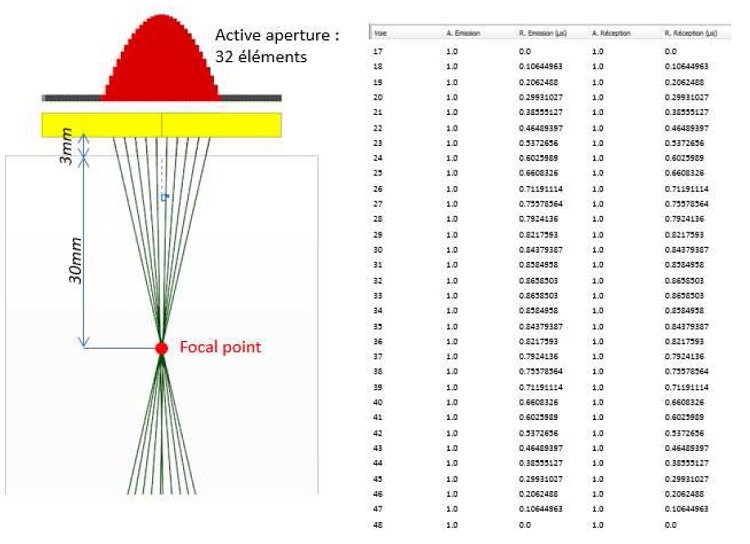
Figure 11 : Loi de retards calculée pour focaliser à 33mm dans l’eau en L0°. Capteur multiéléments 5MH z, configuration avec 32 éléments actifs.
Paramétrage pour la simulation des cartographies XZ ou YZ
Dans CIVA, pour simuler les cartographies des inclusions il faut définir une pièce dont le matériau est de type fluide (eau) dans laquelle on place les inclusions en acier.
De plus, le cas des cartographies XZ est particulier : CIVA permet de les simuler en utilisant une pièce CAO de géométrie plane (dont le matériau est fluide) et en choisissant le positionnement par centre de la pastille. Le déplacement indiqué sur la Figure 12. Ce type de cartographie ne peut être simulé en utilisant une pièce plane.
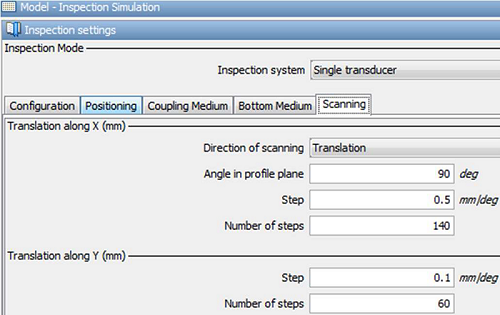
Figure 12 : Configuration du déplacement pour simuler les cartographies XZ ou YZ avec CIVA.
Continuer vers Résultats des configurations sans lois de retards
Retour vers description des mesures
Retour vers Capteur multi-élément