
UT – Multiéléments : Résultats pour l’algorithme de focalisation en différents points
Sommaire
- RÉSULTATS AVEC LE CAPTEUR MATRICIEL CONTACT 2 MHz EN ONDES L
- Evolution de l’amplitude des échos directs L avec la profondeur du défaut
- Comparaison des échodynamiques en ondes L
- Comparaison des Ascans en ondes L
- Comparaison des largeurs de tache focale à -3 dB en ondes L :
- RÉSULTATS AVEC LE CAPTEUR MATRICIEL CONTACT 2 MHz EN ONDES T
- Evolution de l'amplitude des échos directs T avec la profondeur du défaut
- Comparaison des échodynamiques en ondes T
- Comparaison des Ascans en ondes T
- Comparaison des largeurs de tache focale à -3 dB en ondes T
- RÉSULTATS AVEC LE CAPTEUR LINÉAIRE CONTACT 5 MHz EN ONDES L
- RÉSULTATS AVEC LE CAPTEUR LINÉAIRE CONTACT 5 MHz EN ONDES T
- RÉSULTATS AVEC LE CAPTEUR IMMERSION 10 MHz
- Evolution de l'amplitude des échos directs L avec la profondeur du défaut
- Comparaison des échodynamiques et des Ascans en ondes L :
- Comparaison des largeurs de tache focale à -6 dB en ondes T :
- CONCLUSION
RÉSULTATS AVEC LE CAPTEUR MATRICIEL CONTACT 2 MHz EN ONDES L
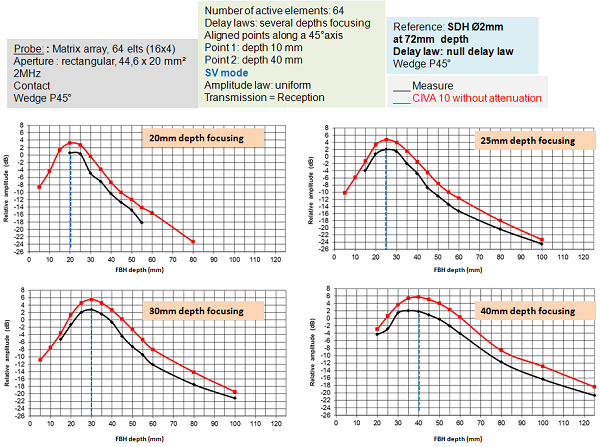
Loi de retards : focalisation à plusieurs profondeurs, angle de déviation 45°, calcul des lois de retards en ondes L, 64 éléments actifs, profondeur du premier point: 10 mm et profondeur du dernier point: 40 mm.
Evolution de l’amplitude des échos directs L avec la profondeur du défaut
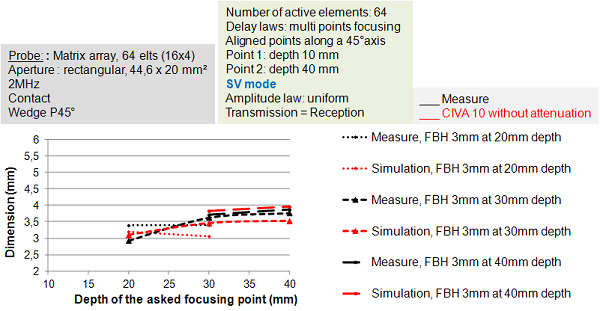
La figure ci-dessous permet de comparer l’évolution des amplitudes simulées et expérimentales des TGs Ø2 mm en fonction de la profondeur. Elle permet aussi de comparer le point de focalisation demandé à celui obtenu expérimentalement.
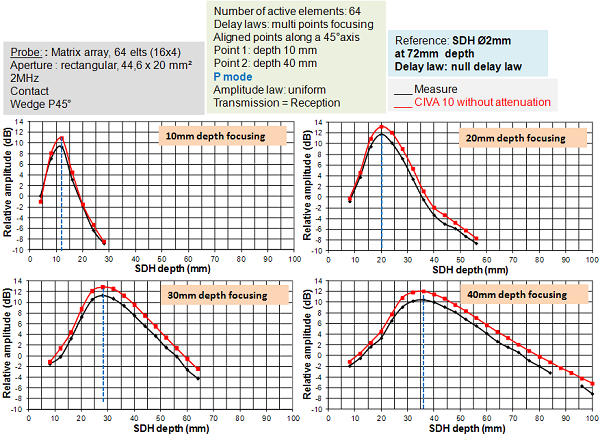
On observe un bon accord entre les deux courbes (écart inférieur à 2 dB) et on vérifie que pour des profondeurs de focalisation inférieures à 30 mm, le point de focalisation demandé lors du calcul des lois de retards correspond bien au point de focalisation expérimental. Des écarts jusque 5 mm entre le point de focalisation souhaité et celui mesuré apparaissent lorsque l’on souhaite focaliser au-delà de 30 mm. Ces écarts sont dus au fait que l’on souhaite focaliser au-delà de la limite de champ proche de ce capteur.
On aboutit aux mêmes constatations avec les résultats obtenus sur les TFPs Ø3 mm.
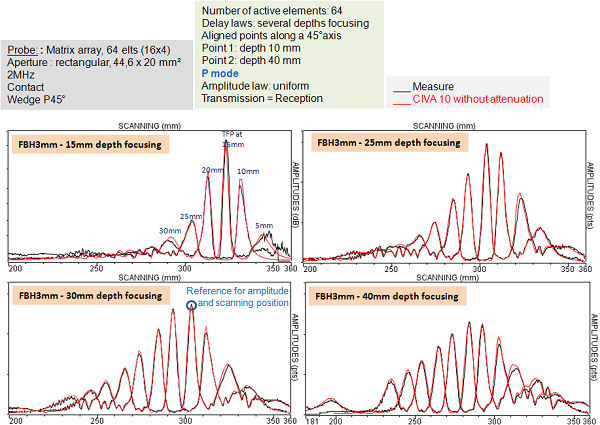
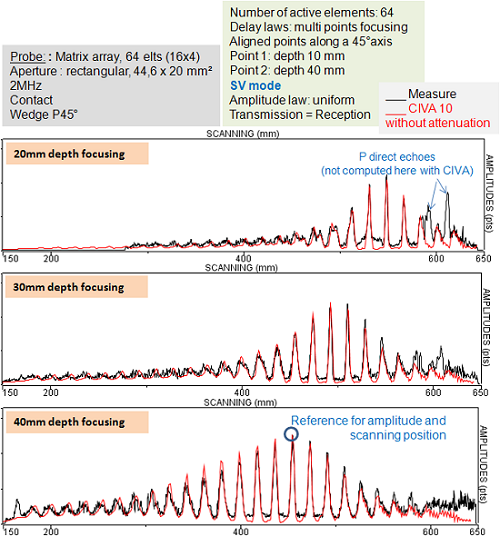
Comparaison des échodynamiques en ondes L
La figure ci-dessous permet de comparer les courbes échodynamiques simulées et expérimentales des TGs Ø2 mm. On observe un bon accord entre les deux courbes.
Les résultats obtenus sur les TFPs Ø3 mm permettent de faire la même remarque.
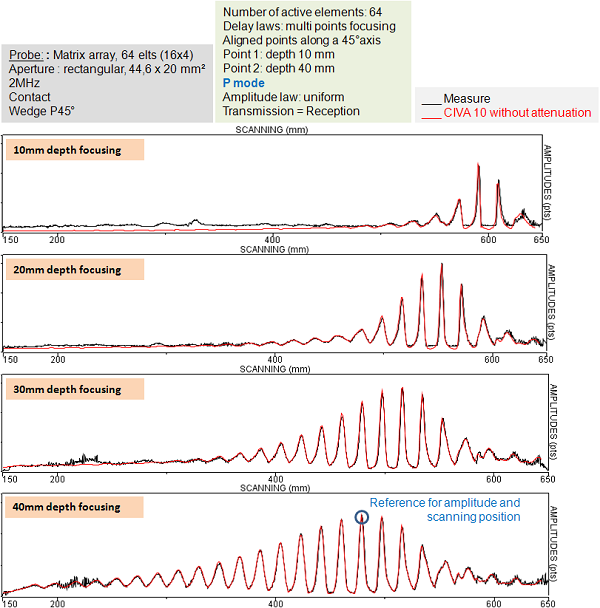
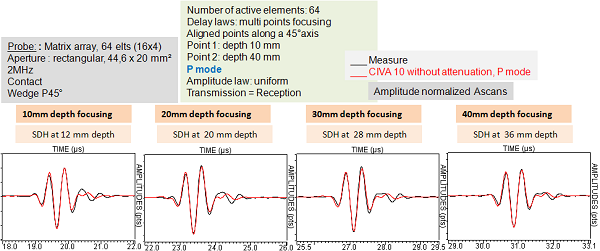
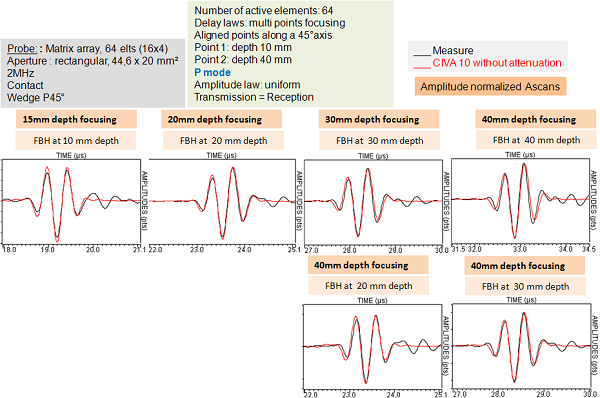
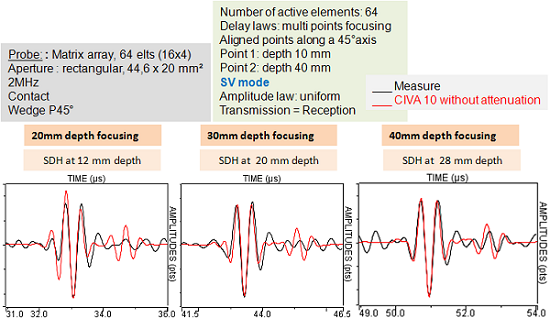
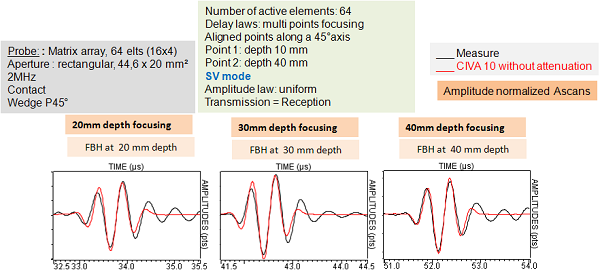
Comparaison des Ascans en ondes L
Quel que soit le défaut (TG ou TFP), on obtient un bon accord entre les Ascans simulés et expérimentaux.
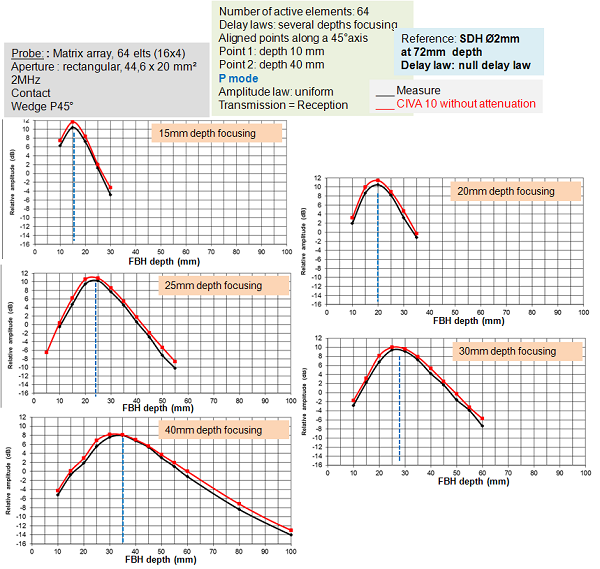
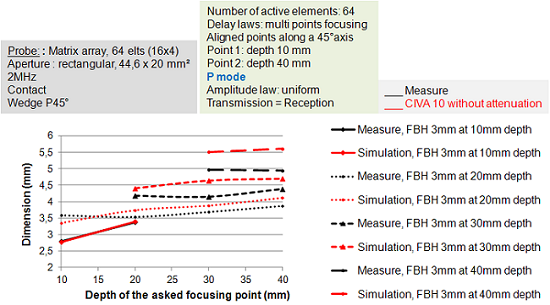
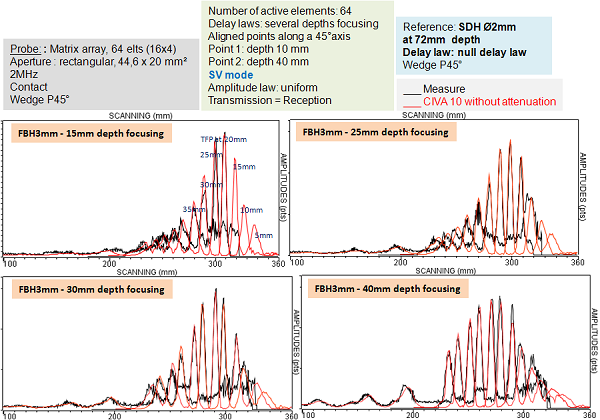
Comparaison des largeurs de tache focale à -3 dB en ondes L :
Les largeurs de tache focale sont mesurées à -3 dB sur les courbes échodynamiques en incrément sur les TFPs Ø3 mm. Les mesures expérimentales sont en bon accord avec les largeurs simulées (cf. figure ci-dessous).
RÉSULTATS AVEC LE CAPTEUR MATRICIEL CONTACT 2 MHz EN ONDES T
Loi de retards : focalisation à plusieurs profondeurs, angle de déviation 45°, calcul des lois de retards en onde T, 64 éléments actifs, profondeur du premier point : 10 mm et profondeur du dernier point:40 mm.
Evolution de l’amplitude des échos directs T avec la profondeur du défaut
Globalement et quelle que soit la nature des défauts (TGs ou TFPs), l’évolution de l’amplitude des échos directs T est bien reproduite par CIVA. Les amplitudes simulées sont plus élevées que celles relevées expérimentalement (2 à 4 dB) mais l’écart étant très proche de l’incertitude expérimentale (3 dB), les résultats demeurent satisfaisants.
On remarque aussi que les points de focalisation expérimentaux correspondent bien aux points de focalisation souhaités (entre 20 mm et 40 mm) car ils sont toujours compris dans la zone de champ proche en ondes T du capteur.
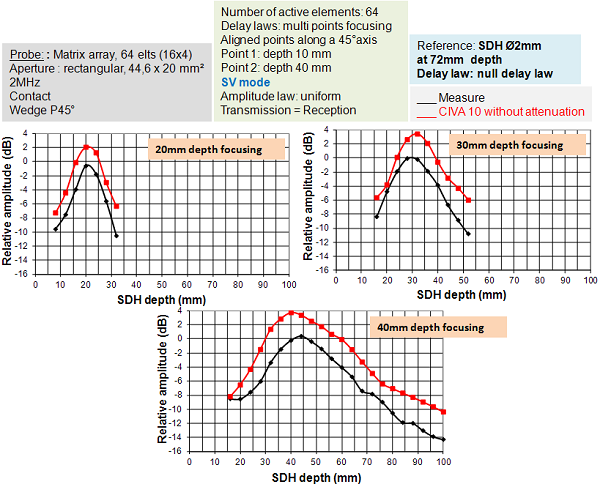
Comparaison des échodynamiques en ondes T
La figure ci-dessous permet de comparer les courbes échodynamiques simulées et expérimentales des TGs Ø2 mm. On observe un bon accord entre les deux courbes.
Les résultats obtenus sur les TFPs Ø3 mm permettent de faire la même remarque.
Comparaison des Ascans en ondes T
La figure ci-dessous permet de comparer les Ascans (simulés et expérimentaux) relevés sur les TGs Ø2 mm. L’accord entre les deux courbes est assez bon même si les Ascans simulés avec CIVA sont un peu plus « haute fréquence » que les expérimentaux. De plus, on remarque que l’amplitude de l’onde rampante est surestimée par CIVA.
La figure suivante présente les résultats obtenus avec les TFPs.
Comparaison des largeurs de tache focale à -3 dB en ondes T
Les largeurs de tache focale sont mesurées à -3 dB sur les courbes échodynamiques en incrément sur les TFPs Ø3 mm. Les mesures expérimentales sont en bon accord avec les largeurs simulées (cf. figure ci-dessous).
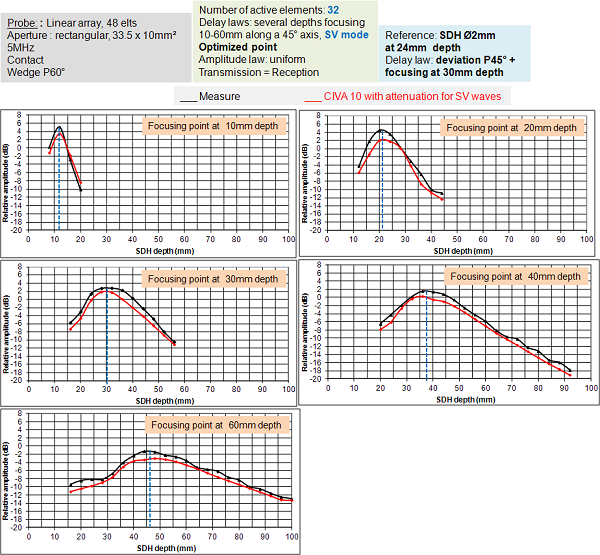
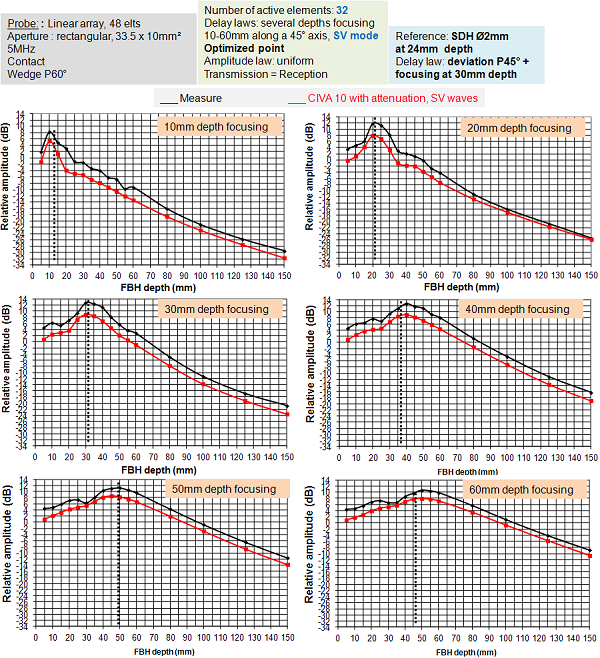
RÉSULTATS AVEC LE CAPTEUR LINÉAIRE CONTACT 5 MHz EN ONDES L
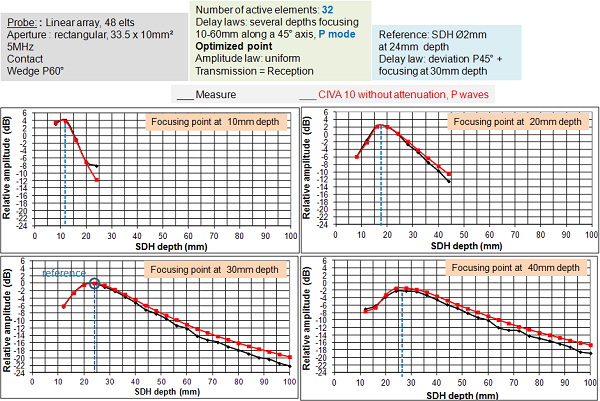
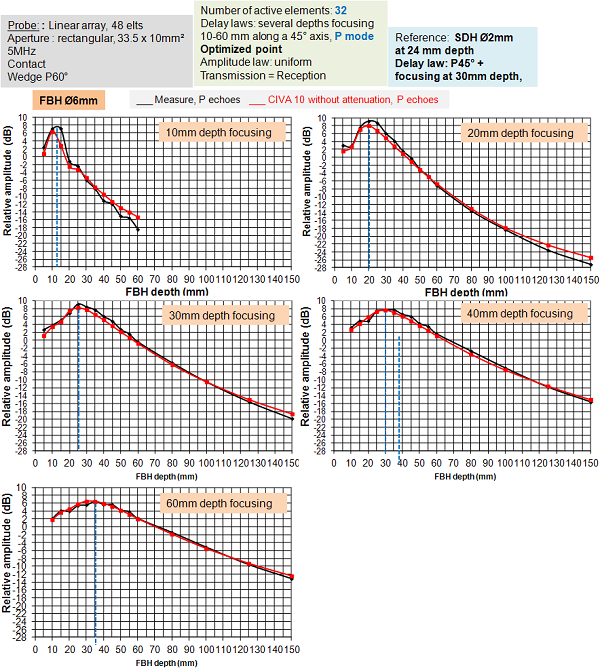
Loi de retards : focalisation en des points multiples le long d’un axe à 45°, mode L, 32 éléments actifs, profondeur du premier point: 10mm et profondeur du dernier point : 60mm, type d’onde pour le calcul des lois : L.
Un très bon accord simulation/expérience a été obtenu lors des comparaisons des amplitudes des échos L des TGs Ø2 mm et des TFPs Ø6 mm. Néanmoins, on constate des écarts entre la profondeur de focalisation souhaitée et celle obtenue expérimentalement lorsqu’elle est supérieure à 20 mm. Ce résultat est normal puisque la limite de champ proche de ce capteur est de 20 mm (cf. plus haut).
RÉSULTATS AVEC LE CAPTEUR LINÉAIRE CONTACT 5 MHz EN ONDES T
Loi de retards : focalisation en des points multiples le long d’un axe à 45°, mode T, 32 éléments actifs, profondeur du premier point: 5 mm et profondeur du dernier point : 60 mm.
Quelle que soit la nature des défauts (TGs et TFPs), l’évolution de l’amplitude des échos directs T est bien reproduite par CIVA. On remarque que CIVA sous-estime les amplitudes de 2 à 3 dB mais l’écart étant très proche de l’incertitude expérimentale (3 dB), les résultats demeurent satisfaisants. Pour des focalisations au-delà de 40 mm de profondeur, on voit apparaitre des différences entre le point focal désiré et le point focal mesuré. Ces écarts sont physiques puisqu’ils traduisent la mauvaise focalisation du faisceau acoustique au-delà de la limite de champ proche en ondes T qui est égale à 40 mm pour ce traducteur.
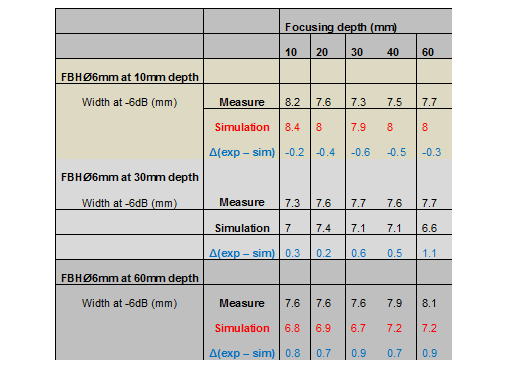
La largeur de la tache focale à -6 dB, dans le plan perpendiculaire au plan d’inspection, a été mesurée à partir des courbes échodynamiques en incrément extraites à la position du capteur pour laquelle on mesure le maximum d’amplitude des échos de TFPs. Les résultats expérimentaux et simulés sont en bon accord (cf. tableau ci-dessous).
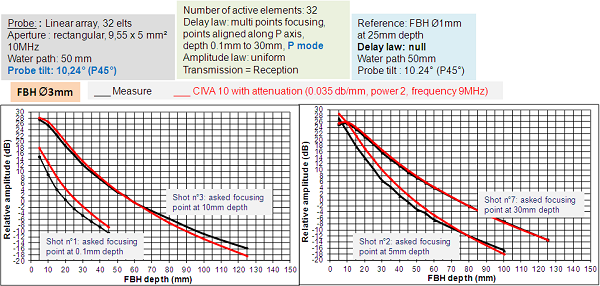
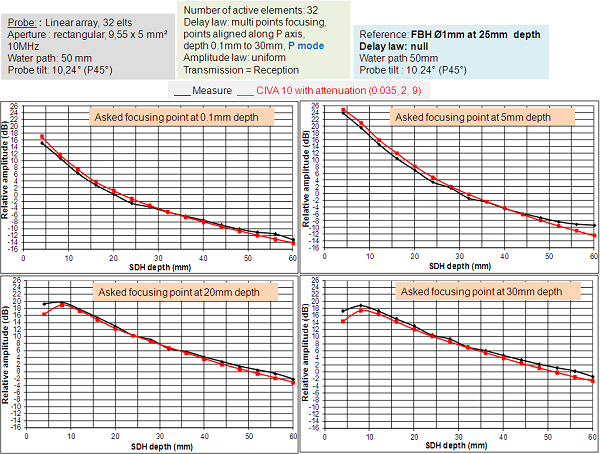
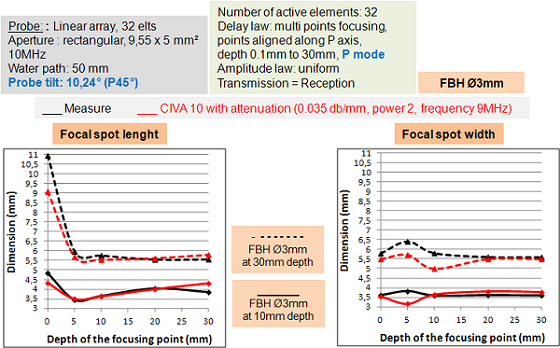
RÉSULTATS AVEC LE CAPTEUR IMMERSION 10 MHz
La hauteur d’eau est de 50 mm et le capteur est incliné avec un angle de 10,24°.
Lois de retards : points de focalisation alignés le long de l’axe L, profondeur du premier point: 0,1 mm et profondeur du dernier point : 30 mm, type d’onde pour le calcul des lois : L, séquence de 32 éléments.
Evolution de l’amplitude des échos directs L avec la profondeur du défaut
La figure ci-dessous permet de comparer l’évolution des amplitudes simulées (avec la loi d’atténuation en exposant 2) et expérimentales des TFPs Ø3 mm en fonction de la profondeur. On observe un bon accord entre les deux courbes qui montrent des écarts inférieurs ou égaux à 2 dB. Par ailleurs, il est normal d’observer d’importants écarts entre les points de focalisation souhaités et les points de focalisations mesurés. En effet, la limite de champ proche en ondes L de ce capteur est de 10 mm environ. Il n’est donc pas surprenant d’observer des écarts pour des focalisations souhaitées au-delà de cette limite.
Les résultats obtenus sur les TGs Ø2 mm sont aussi en très bon accord.
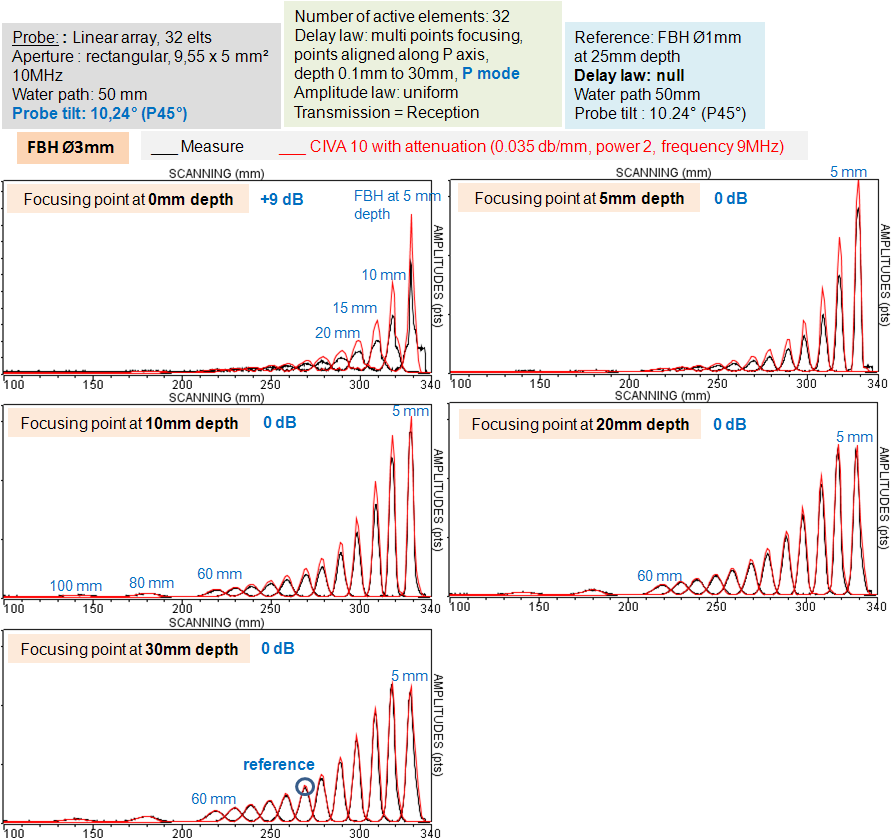
Comparaison des échodynamiques et des Ascans en ondes L :
La figure ci-dessous permet de comparer les courbes échodynamiques simulées et expérimentales des TGs Ø2 mm. On observe un bon accord entre les deux courbes sauf lorsque le point de focalisation est situé très près de la surface.
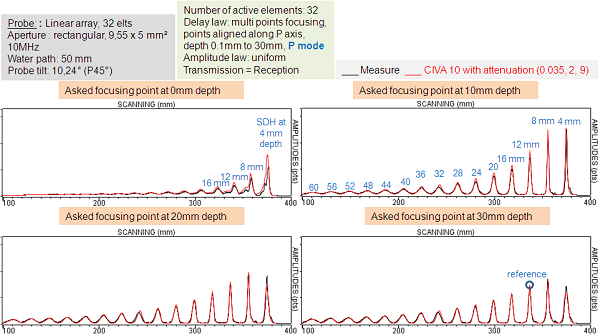
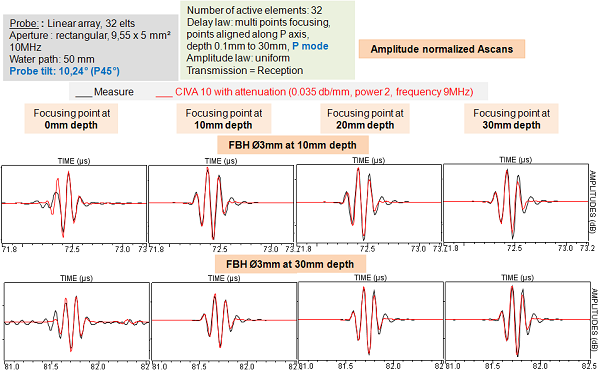
On peut faire la même remarque en observant les courbes échodynamiques et les Ascans obtenus avec les TFPs Ø3 mm (figures ci-dessous). Les courbes simulées concordent moins bien avec les courbes expérimentales lorsque la focalisation est proche de la surface (de 0 à 10 mm).
Comparaison des largeurs de tache focale à -6 dB en ondes T :
Les largeurs de tache focale sont mesurées à -6 dB sur les courbes échodynamiques des TFPs Ø3 mm. Les mesures expérimentales sont en bon accord avec les largeurs simulées (cf. figure ci-dessous).
CONCLUSION
Globalement, on constate, pour cet algorithme de lois de retards, un bon accord entre l’expérience et la simulation avec les trois capteurs utilisés. Les lois de retards calculées par CIVA permettent bien de focaliser aux profondeurs de focalisation souhaitées. Les écarts observés entre le point focal désiré et le point focal mesuré ne sont pas dus au calcul des lois par CIVA mais aux limites physique de focalisation des traducteurs, c’est-à-dire la limite de champ proche. Lorsque l’on souhaite focaliser au-delà de cette limite, voire au-delà des 2/3 de cette limite, la focalisation ne peut être assurée exactement à la profondeur demandée.
Continuer vers Résultats pour l’algorithme de balayage angulaire
Retourner à Multiéléments