Vue globale :
| Capteur immersion | 2,25 MHz Ø19 mm | 2,25 MHz Ø12,7 mm | 2,25 MHz Ø6,35 mm | 2,4 MHz Ø20 mm | 4,5 MHz Ø12,7 mm | 4,7 MHz Ø6,35 mm |
| L0° | Traité | Traité | Traité | Traité | ||
| L45° | Traité | Traité | ||||
| L60° | Traité | Traité | ||||
| T45° | Traité | Traité | Traité | Traité | ||
| T50° | Traité | Traité | ||||
| T55° | Traité | Traité | ||||
| T60° | Traité | Traité |
Configuration
Des mesures expérimentales ont été réalisées sur une pièce plane en acier contenant des TG de Ø2 mm entre 4 et 60 mm de profondeur par pas de 4 mm. Pour rappel, les paramètres de l’acier sont : densité de 7,9, vitesses des ondes L : 5900 m/s et des ondes T : 3230 m/s. Les TG étant inspectés perpendiculairement à leur axe, le modèle d’interaction SOV a été utilisé.
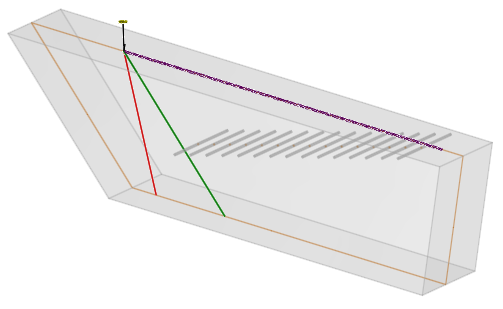
Voici la maquette qui a été utilisée.
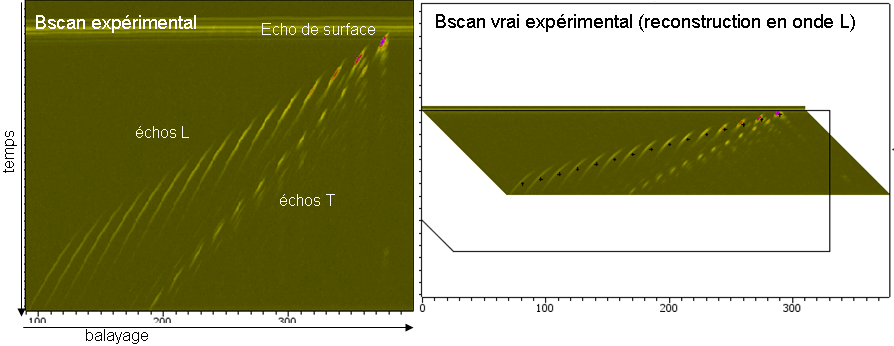
Après un balayage le long de la surface de la pièce, le B-scan suivant est affiché :
Pour cette configuration, 6 capteurs en immersion différents ont été utilisés en mode Pulse Echo. Tous les capteurs sont circulaires et ont une surface plane (pas de focalisation) :
| Fréquence | Pastille | Mode | Hauteur d'eau | Profondeur d'étalonnage |
| 2,25 MHz | 19 mm | L0° | 50 mm | 20 mm |
| 12,7 mm | L0° | 50 mm | 12 mm | |
| 6,35 mm | T45°, L0° | 20 mm | 12 mm (L0°-20 mm) | |
| 2,4 MHz | 20 mm | T45°, T60°, L45°, L60°, L0° | 50 mm | 32 mm (T45°) |
| 4,5 MHz | 12,7 mm | T45° à T60° | 20 mm | 32 mm (T45°) |
| 4,7 MHz | 6,35 mm | L et T, de 45°à 60° | 25 mm | 4 mm (L45°) |
Résultats
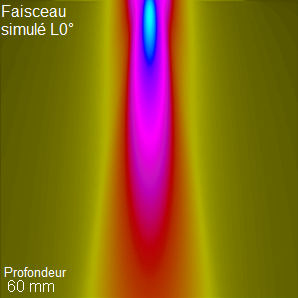
Pour chaque capteur, le résultat de la simulation du champ L et / ou T rayonné dans la pièce et dans le plan d’incidence est affiché. La profondeur à laquelle l’amplitude du champ rayonné est maximale est mesurée sur ce champ simulé. Elle est également indiquée par la ligne pointillée bleue sur les courbes d'amplitude maximale en fonction de la profondeur de TG.
L’amplitude relative maximale est relevée pour chacun des échos ; les courbes relatives aux échos expérimentaux et simulés en fonction de la profondeur des TG sont superposées sur les figures suivantes.
Capteur en immersion monoélément de Ø19 mm à 2,25 MHz

Les résultats sont étalonnés par rapport au TG de Ø2 mm à 20 mm de profondeur.
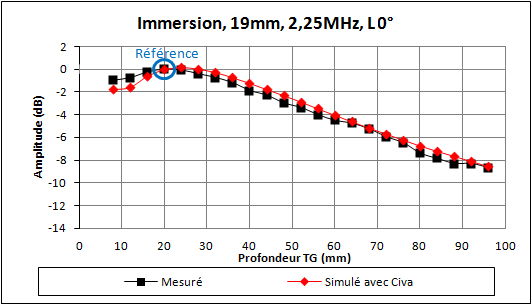
L’accord est bon entre les résultats expérimentaux et les résultats simulés par Civa. L’écart est toujours inférieur à 1 dB.
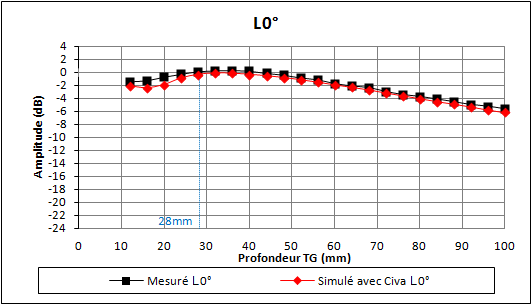
Capteur en immersion monoélément de Ø12,7 mm À 2,25 MHz
Pour le capteur en immersion circulaire de Ø12,7 mm à 2,25 MHz avec une hauteur d’eau de 50 mm, l’inspection est réalisée avec le mode L0°. Le signal d’entrée a une fréquence de 2,25 MHz, une bande passante de 60% et une phase de 0°.
Le faisceau acoustique est illustré ci-dessous
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 12 mm de profondeur.
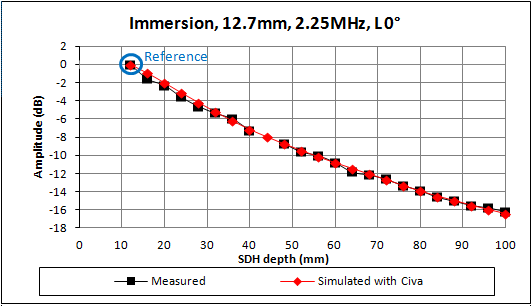
L’accord est bon entre les résultats expérimentaux et les résultats simulés par CIVA.
CAPTEUR EN immersion MONOÉLÉMENT DE Ø6,35 mm À 2,25 MHz
Pour le capteur en immersion circulaire de Ø6,35 mm à 2,25 MHz avec une hauteur d’eau de 20 mm, l’inspection est réalisée avec les modes L0° et T45°. Pour le mode L0°, le signal d’entrée est expérimental, il correspond à l’écho spéculaire en mode T45° généré par un TFP de Ø3 mm incliné de 45° à 10 mm de profondeur. Le signal d’entrée a une fréquence de 2,25 MHz, une bande passante de 64% et une phase de 290° pour le mode T45°. Le faisceau acoustique est illustré ci-dessous pour le mode L0°.
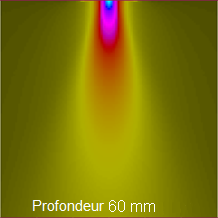
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 8 mm de profondeur.
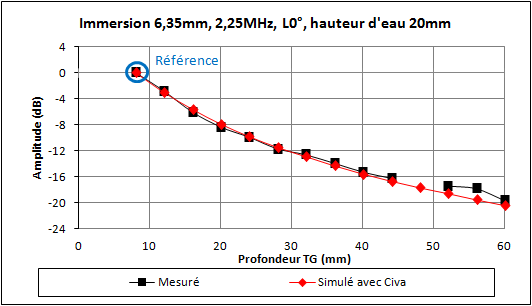
L’accord est bon entre les résultats expérimentaux et les résultats simulés par CIVA. L’écart maximal est de 1 dB pour le mode L0° et de 2 dB pour le mode T45°.
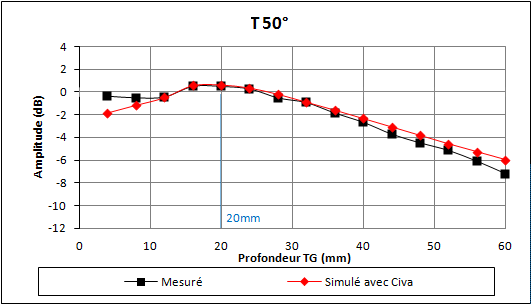
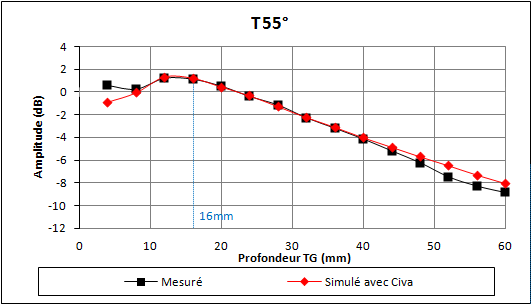
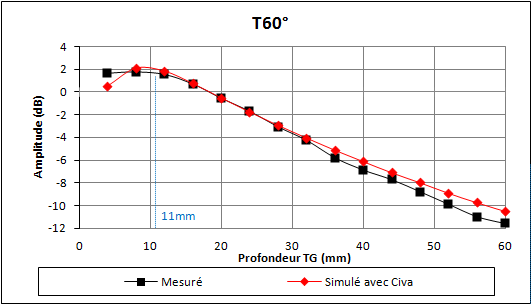
CAPTEUR EN immersion MONOÉLÉMENT DE Ø20 mm À 2,4 MHz
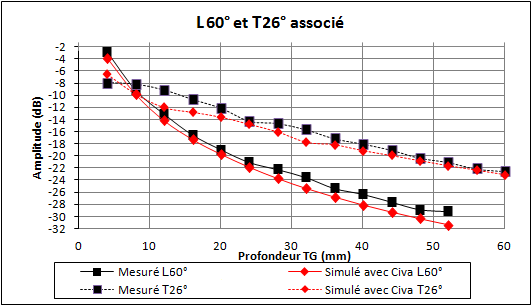
Pour le capteur en immersion circulaire de Ø20 mm à 2,4 MHz avec une hauteur d’eau de 20 mm, l’inspection est réalisée avec les modes T45°, T60°, L45°, L60° et L0°. On peut remarquer que pour les modes L45° et L60°, un mode T associé est également rayonné, à 22° et 26° respectivement. Le signal d’entrée a une fréquence de 2,4 MHz, une bande passante de 53% et une phase de 170°. La profondeur focale acoustique est de 32 mm pour le mode T45°, déduite du faisceau simulé illustré ci-dessous.
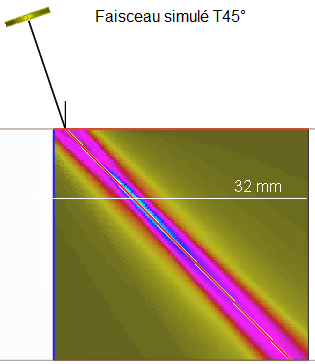
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 32 mm de profondeur inspecté en mode T45°.
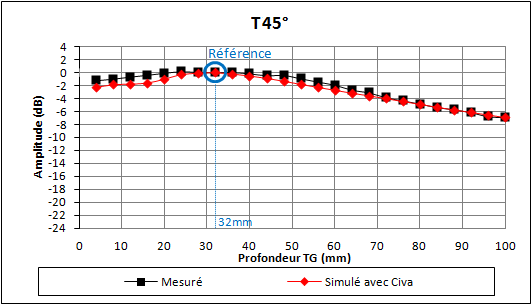
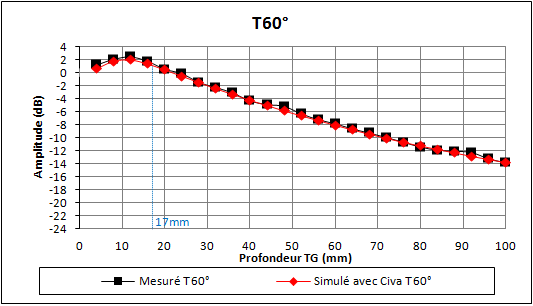
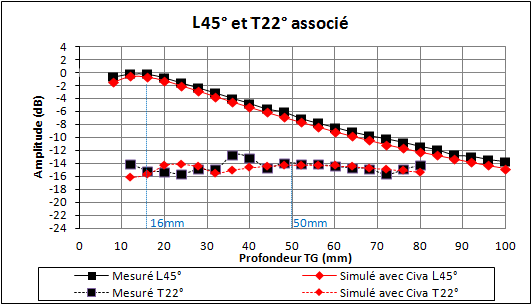
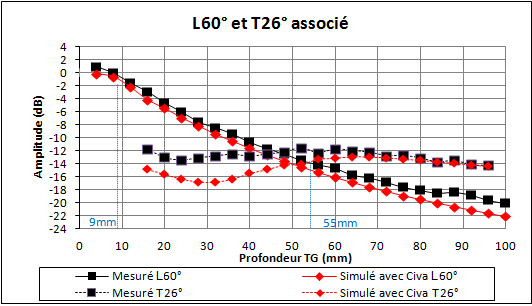
Sur les 5 figures, l’accord est bon entre les résultats expérimentaux et les résultats obtenus avec CIVA. Il apparait que l’amplitude de l’écho principal est bien estimé avec un écart inférieur à 2 dB dans le pire des cas pour la plupart des configurations étudiées.
Un seul cas présente des différences plus marquées, il correspond au mode T26° associé avec le mode L60°. L’écart atteint 4 dB dans le champ proche. Ceci est dû à une division du mode T au niveau de l’interface eau/acier, qui n’est pas observée expérimentalement. Cette division du mode T est liée aux limitations du modèle. La forte variation du coefficient de transmission à proximité de l’angle critique génère cette division du faisceau T incident. Certaines ondes n’étant pas prises en compte, cela réduit l’amplitude de l’écho T simulé.

Division du faisceau T pour un capteur au contact de Ø12,7 mm générant des ondes L45°
CAPTEUR EN immersion MONOÉLÉMENT DE Ø12,7 mm À 4,5 MHz
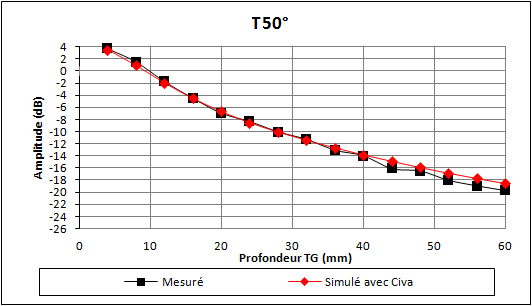
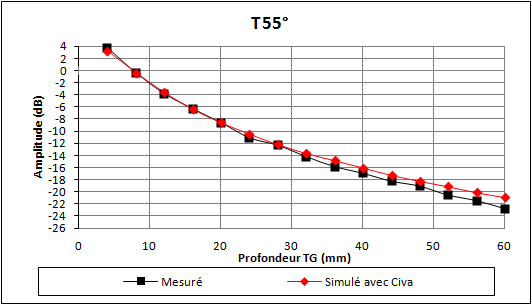
Pour le capteur en immersion circulaire de Ø12,7 mm à 4,5 MHz avec une hauteur d’eau de 20 mm, l’inspection est réalisée avec les modes T45° à T60°. Le signal d’entrée a une fréquence de 4,5 MHz, une bande passante de 73% et une phase de 270°.
La profondeur focale acoustique est de 26 mm pour le mode T45°, déduite du faisceau simulé illustré ci-dessous.
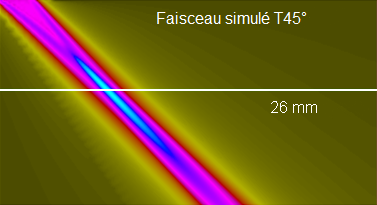
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 32 mm de profondeur inspecté en mode T45°.
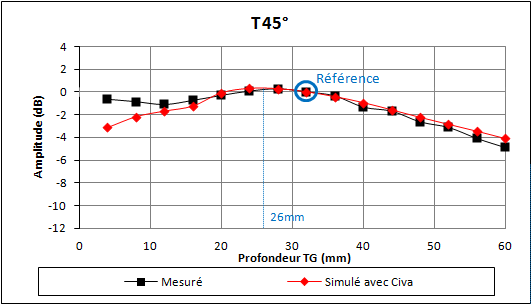
L’accord est bon entre les résultats expérimentaux et les résultats simulés par CIVA. On peut simplement remarquer que CIVA surestime d’environ 2 dB les échos en champ très proche.
CAPTEUR EN immersion MONOÉLÉMENT DE Ø6,35 mm À 4,7 MHz
Pour le capteur en immersion circulaire de Ø6,35 mm à 4,7 MHz, l’inspection est réalisée avec différents modes (L et T de 45° à 60°). La hauteur d’eau est de 25 mm sauf dans un cas où elle est de 10 mm. Le signal d’entrée a une fréquence de 4,7 MHz, une bande passante de 56% et une phase de 255°.
Le faisceau acoustique est illustré ci-dessous pour le mode L45° avec 25 mm de hauteur d’eau.
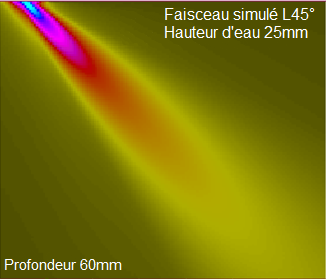
Les résultats sont étalonnés par rapport au TG de Ø2 mm à 4 mm de profondeur inspecté en mode L45° avec 25 mm de hauteur d’eau.
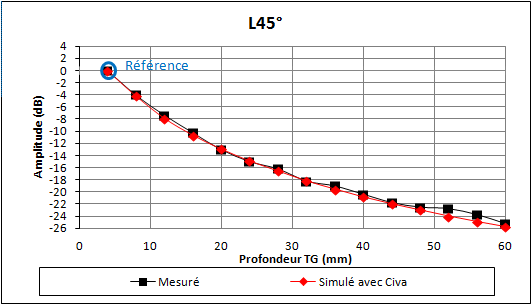
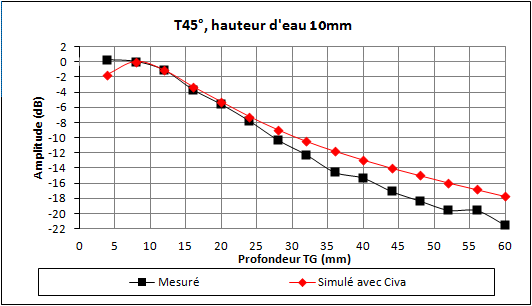
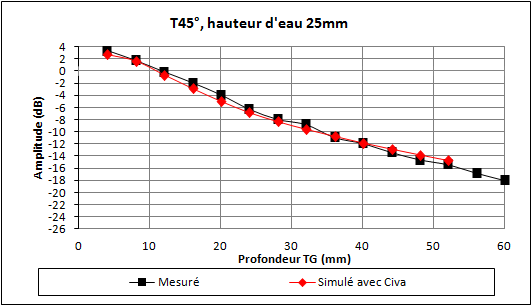
Quels que soient l’angle d’incidence et la hauteur d’eau, les résultats issus de la simulation ont moins de 2 dB d’écart avec les résultats expérimentaux.
On peut noter que pour cette pastille utilisée en mode T45° les écarts tendent à augmenter aux grandes profondeurs ; ce point avait déjà été relevé pour une pastille de même dimension utilisée à 2,25 MHz.
Conclusion
Les résultats montrent un bon accord avec généralement moins de 2 dB d’écart pour tous les capteurs mono-éléments en immersion.
En champ proche les écarts sont légèrement plus importants. Ceci est dû à des limitations du modèle et sera expliqué plus en détails pour les capteurs rectangulaires au contact.
Continuer vers Trous génératrices et capteurs monoélément au contact
Retourner au menu Réflecteurs génératrices
Retourner au menu Réflecteurs artificiels