La configuration expérimentale varie très peu entre les différents cas traités. Il s’agit toujours de configurations TOFDT au contact rayonnant des ondes L dans des pièces en acier. Nous étudierons trois types d’échos : les échos de trous génératrices de différents diamètres (pour les étalonnages) et les échos de bords hauts et bas d’entailles de différentes hauteurs.
BANCS D'ESSAIS et reproductibilité
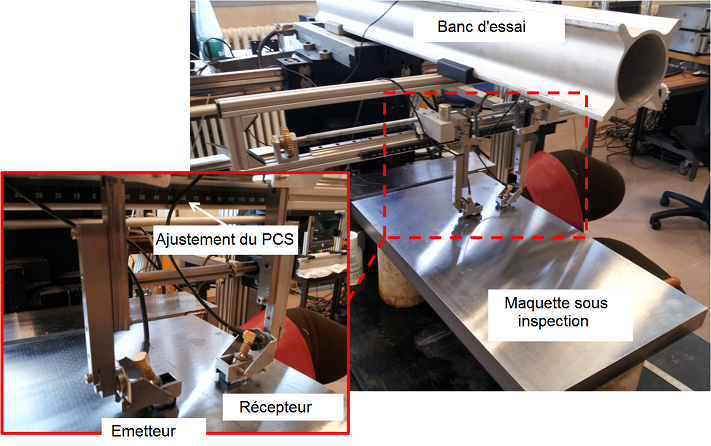
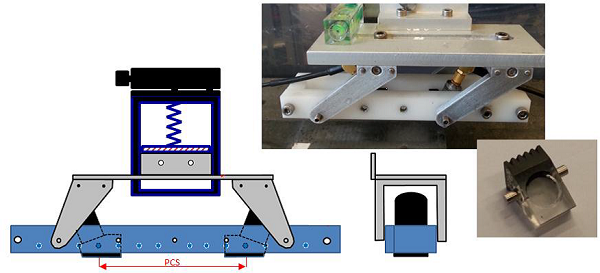
Pour réaliser des acquisitions automatiques de type C-scans, les traducteurs sont fixés, par l’intermédiaire d’une mécanique adaptée à une inspection TOFDT, à un banc mécanique 3 axes « micro contrôle ». Ce dernier permet d’ajuster finement les paramètres tels que le PCS, l’orientation des capteurs en vis-à-vis et d’assurer un bon placage des sabots sur la surface des blocs. Le couplage acoustique est optimisé par le dépôt d’un gel entre les sabots des traducteurs et la surface de la pièce. Une photo du montage TOFDT complet est présentée ci-dessous :
Les échos de diffractions d’une entaille verticale dépendent fortement de l’angle d’incidence des rayons arrivant sur cette dernière. Les échos de diffraction dépendent aussi de la position du défaut dans le champ des capteurs. Faire varier le PCS permet de modifier ces deux paramètres. De cette manière, la détection des échos de diffraction haut et bas d’une entaille peut être optimisée.
Pour l'étude sur les ondes latérales et les échos de bords bas d'entaille, le banc d'essai a été mis à jour avec un nouveau dispositif permettant de conserver une PCS fixe au cours du déplacement des traducteurs tout en garantissant une pression équivalente sur chacun d’entre eux.
Une procédure expérimentale interne a été adoptée afin d’assurer une bonne reproductibilité souvent difficile à obtenir compte tenu des contraintes liées au bon contact des traducteurs UT. Elle est valable lorsque la pièce est plane et son état de surface exempt d’irrégularités.
La procédure expérimentale est divisée en 3 parties :
- La première partie consiste à réaliser un ensemble de réglages mécaniques afin de garantir un couplage optimal et identique pour les deux capteurs (émetteur et récepteur) et pour assurer la répétabilité entre deux acquisitions différentes (après démontage et remontage complet de l’expérience par exemple). A l’issue de ces premiers réglages pour une PCS donnée, la valeur d’amplitude de l’onde latérale est retenue et notée comme valeur de référence.
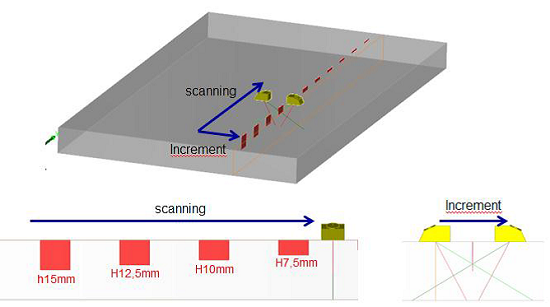
- La seconde partie concerne l’acquisition (déplacement mécanique des capteurs et stockage de données) qui est réalisée en prenant pour axe de balayage l’axe parallèle à l’arête de l’entaille et pour axe des incréments l’axe perpendiculaire à l’arête de l’entaille (Figure ci-dessous). Un C-scan est ainsi réalisé avec stockage systématique de l’onde latérale.
Le C-scan permet de juger du sens de balayage optimal pour le relevé d’amplitude car il existe souvent un sens de balayage (aller ou retour) pour lequel le couplage des capteurs est le meilleur et exempt de vibrations parasites.
L’amplitude de l’onde latérale est comparée à la valeur de référence déterminée dans la première partie. L’acquisition est considérée comme valable si l’écart entre ces deux amplitudes ne dépasse pas + /-2dB pour le sens de balayage retenu.
Enfin, la dernière partie concerne le relevé d’amplitude. Cette étape est également cruciale pour garantir des mesures comparables entre deux opérateurs différents. Il s’agit d’une méthode en 2 temps :
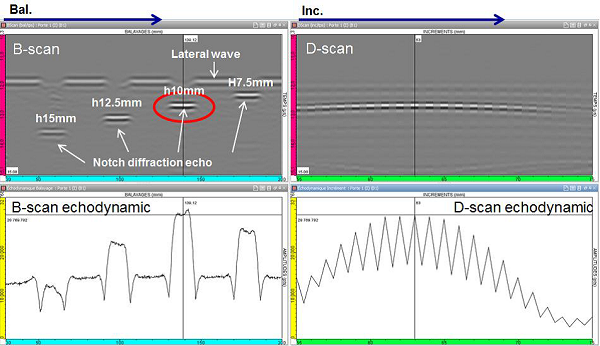
- Positionnement du curseur balayage au milieu de l’indication depuis l’échodynamique du B-scan (centre du défaut)
- Positionnement du curseur incrément au maximum d’amplitude depuis l’échodynamique du D-scan (sélection de l’incrément correspondant au balayage optimal pour lequel l’amplitude est maximale)
PIÈCES ET MATÉRIAU
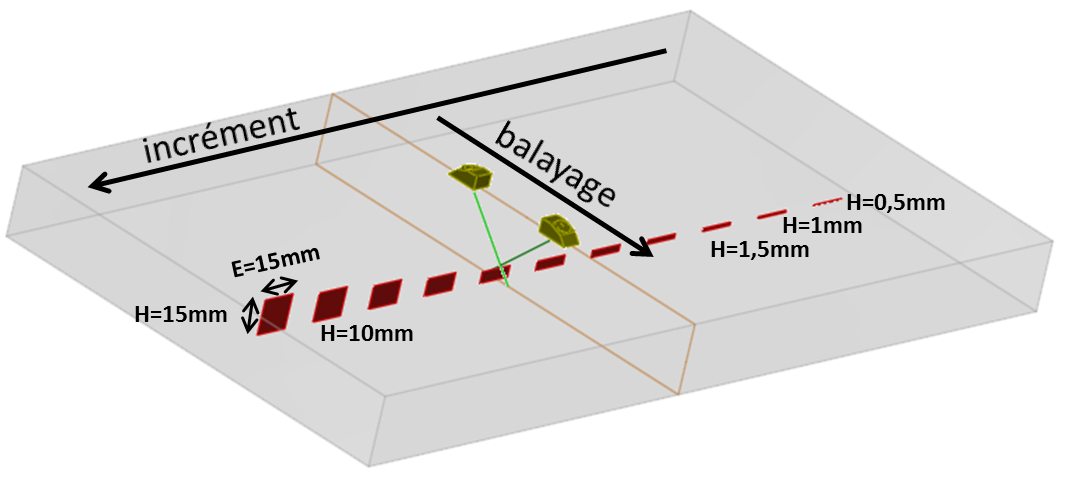
Le sens d’inspection de la « pièce à entailles » utilisé pour étudier les échos de diffraction sur les bords hauts des entailles est montré sur la figure ci-dessus. Pour accéder aux bords bas des entailles, la pièce est tout simplement renversée.
La densité et les vitesses de propagation des ultrasons dans l’acier sont les suivantes :
| Densité | 7,8 g.cm-3 |
| Vitesse des ondes L | 5900 m/s |
| Vitesse des ondes T | 3230 m/s |
Aucune atténuation n'a été prise en compte pour les ondes L et T.
L’atténuation due au matériau n’a pas été étudiée dans cette partie. On note cependant que l’atténuation liée à la divergence du faisceau est toujours prise en compte par CIVA.
CAPTEURS UTILISÉS
Les sabots sont en plexiglas (densité 1,18 g/cm^3, vitesse de 2730 m/s pour les ondes L et de 1340 m/s pour les ondes T). Les sabots sont plans et de dimension avoisinant 16x11,5x7 mm.
Capteur L60
Le premier capteur permet une inspection selon le mode L60. Il s’agit d’un capteur au contact, circulaire de diamètre Ø6,35 mm et de fréquence centrale 5 MHz. Après étalonnage, le signal d’entrée a une fréquence de 4,85 MHz, une bande passante de 66 % et une phase de 310°.
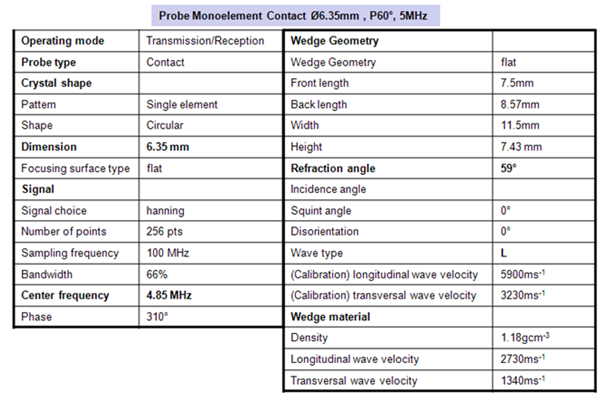
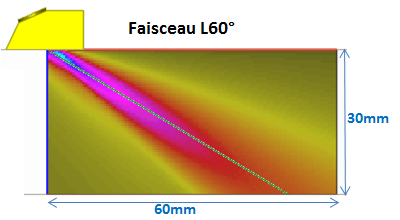
Ce capteur rayonne un faisceau orienté à 59° comme illustré ci-dessous :
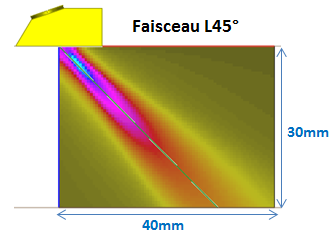
Capteur L45
Le deuxième capteur permet une inspection selon le mode L45. Il s’agit d’un capteur au contact, circulaire, de diamètre Ø6,35 mm et de fréquence centrale 5 MHz. Après étalonnage, le signal d’entrée a une fréquence de 4,85 MHz, une bande passante de 66 % et une phase de 310°.
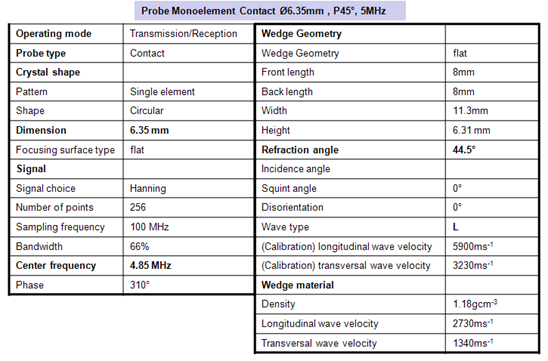
Ce capteur rayonne un faisceau orienté à 44,5° comme illustré ci-dessous :
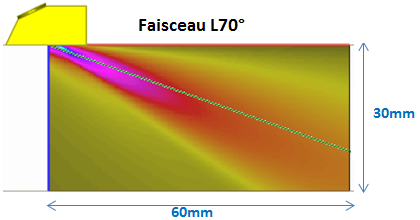
Capteur L70
Le troisième capteur permet une inspection selon le mode L70. Il s’agit d’un capteur au contact, circulaire, de diamètre Ø6,35 mm et de fréquence centrale 5 MHz. Après étalonnage, le signal d’entrée a une fréquence de 4,85 MHz, une bande passante de 66 % et une phase de 310°.
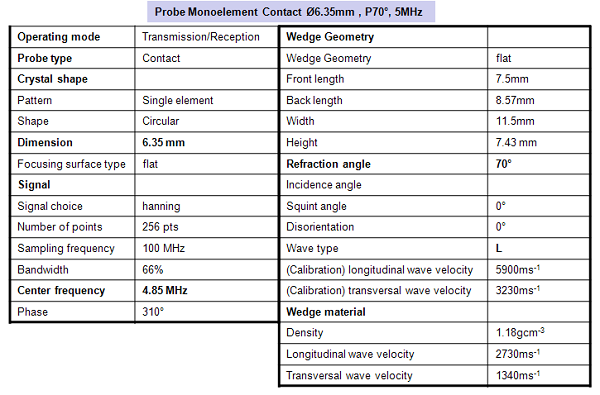
Ce capteur rayonne un faisceau orienté à 70° comme illustré ci-dessous :
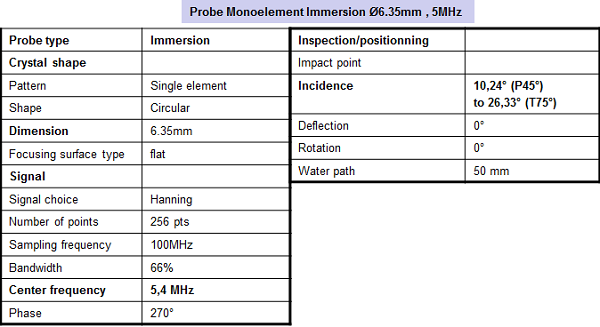
Capteur immersion à 5 MHz
Le dernier capteur s'utilise en immersion. Comme les précédents, il s’agit d’un capteur au contact, circulaire, de diamètre Ø6,35 mm et de fréquence centrale 5 MHz.
INCERTITUDES
incertitudes de mesure
Les sources d’incertitudes ont été minimisées grâce au respect d’une procédure expérimentale avant chaque expérimentation (vérification du système, caractérisation des traducteurs…). Les incertitudes sont liées :
- aux ajustements mécaniques,
- aux défauts usinés dans les maquettes,
- à l’intégrité du matériau (acier) constituant le bloc inspecté (présence d’inhomogénéités).
L’incertitude sur l’amplitude a été évaluée par vérification de la reproductibilité des résultats expérimentaux.
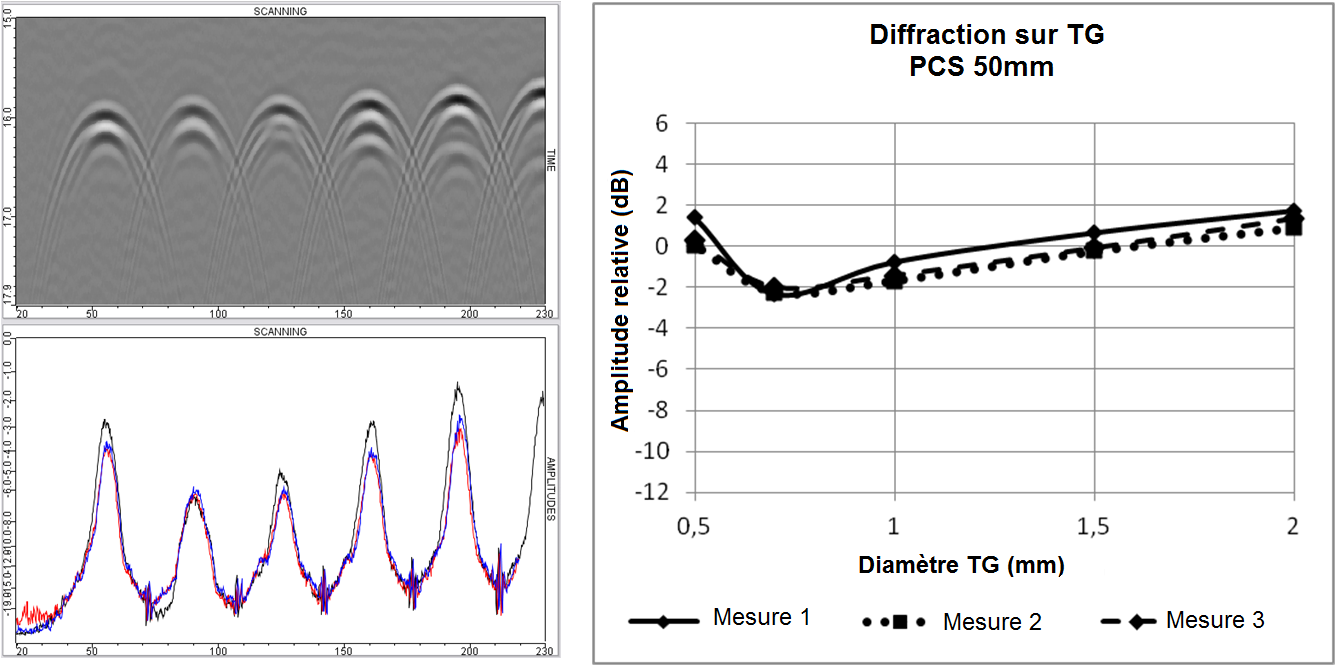
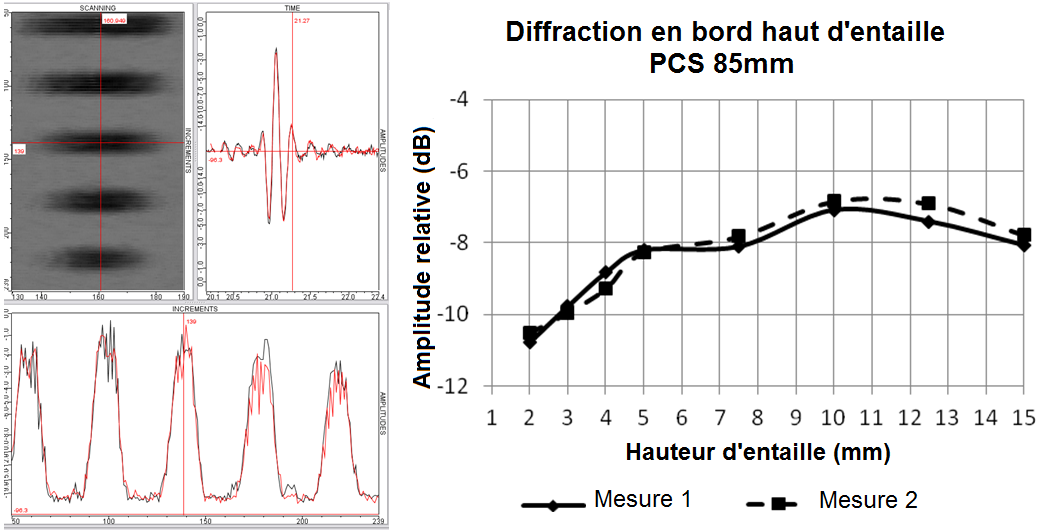
Les incertitudes sur l’amplitude des TG et échos de bords hauts d'entaille ont été évaluées à +/-1 dB comme indiqué sur les figures ci-dessous montrant les résultats obtenus avec un capteur L60 à 5 MHz.
L’incertitude sur l’amplitude a été estimée à +/- 3dB (1.5dB correspondant à l'incertitude sur la mesure du réflecteur de référence et 1.5dB correspondant à l'incertitude sur la mesure des échos de diffraction du bord des entailles) après vérification de la reproductibilité des résultats expérimentaux.
En ce qui concerne le temps de vol, la base de temps de l’appareil ultrasonore est ajustée en mode pulse écho sur un réflecteur approprié ayant un parcours ultrasonore connu (quadrant de la cale V2 par exemple). L’incertitude de mesure a été évaluée par vérification de la reproductibilité des résultats expérimentaux à +/- 0.5μs.
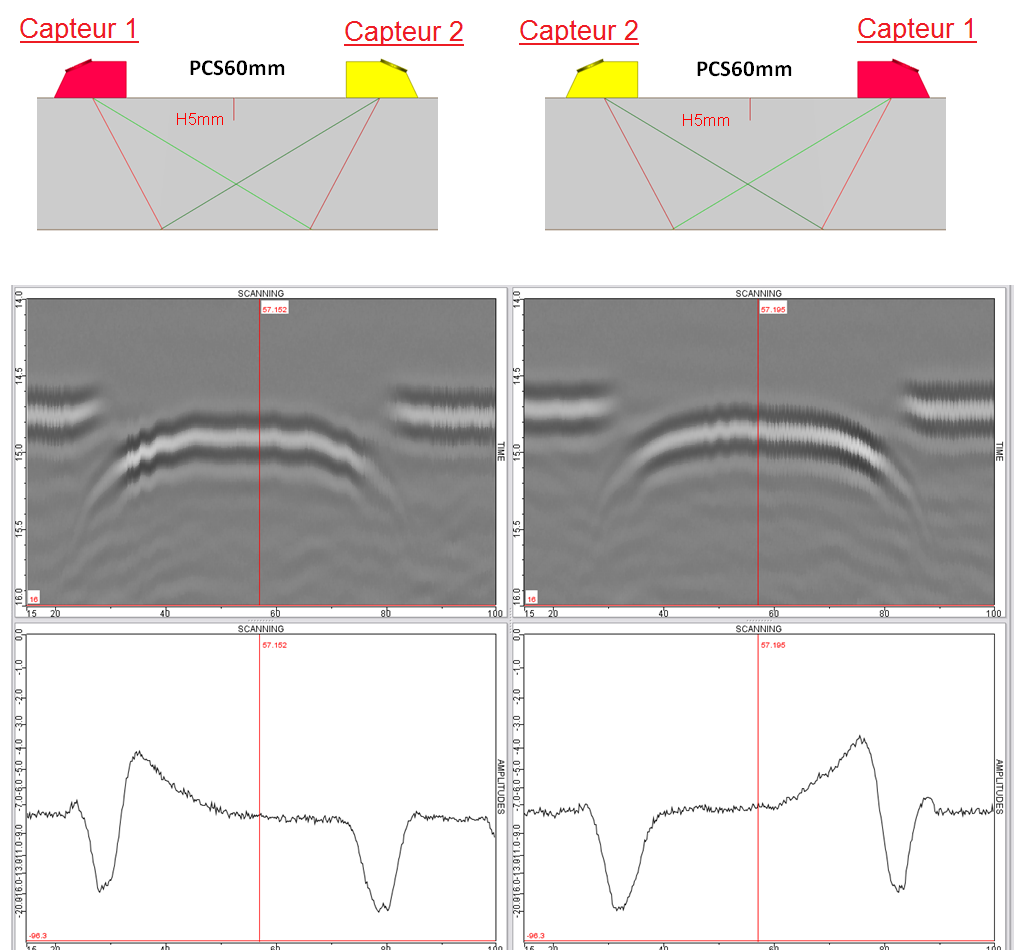
Par ailleurs, on a remarqué dans certains cas une dissymétrie des résultats. En inversant les deux capteurs, cette dissymétrie se retrouve symétriquement par rapport au centre du défaut. Ceci s’explique par le fait que les deux traducteurs utilisés ne rayonnent pas exactement le même faisceau, par exemple l’un à 59° et l’autre à 61°. Lorsque la dissymétrie est observée, les relevés d’amplitudes n’ont pas été effectués.
Effet du couplant dans l'entaille
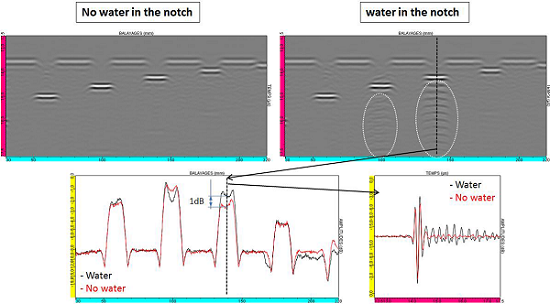
Les entailles sont d’épaisseur suffisamment importante pour que le couplant s’y infiltre. Ceci est difficilement évitable notamment lorsque la PCS est faible. Afin d’évaluer l’impact de la présence de couplant sur les échos de diffraction des bords bas, des mesures ont été réalisées avec et sans présence du couplant dans l’entaille. Les B-scans, les superpositions des A-scans et les échodynamiques expérimentaux obtenus avec et sans présence de couplant pour l’entaille de 10mm de hauteur montrent l’apparition d’un effet de « résonance » après le temps de vol de l’écho de diffraction. De plus, on note un écart d’amplitude de 1dB maximum (voir figure ci-dessous). En revanche, la forme du signal de diffraction n’est pas affectée et la différence d’amplitude est comprise dans l’incertitude de mesure. L’effet du couplant a donc été négligé par la suite.
PARAMÈTRES DE SIMULATION
Les simulations de validation sur les bords bas d'entailles, ondes latérales et échos de géométrie ont été menées avec CIVA 11.0a et une précision de 3 pour le champ et les réponses défauts.
Modèles de simulation
- Le modèle d’interaction « SOV » (Séparation de Variables) afin de modéliser les interactions entre les faisceaux et les trous génératrices. Ce modèle prend notamment en compte la propagation des ondes rampantes le long de la circonférence du TG.
- Le modèle d’interaction « GTD » (Théorie Géométrique de la Diffraction) afin de modéliser les interactions entre les faisceaux et les bords d’entailles.
- le modèle GTD avec la variable d’exécution « CALCUL_MULTI_VOIES » : CIVA_GTD_MULTIVOIES ou CIVA_GTD_MV consiste à remplacer un capteur monoélément par un capteur multiéléments de même dimension et à calculer les échos de diffraction avec le modèle GTD en activant la variable d’exécution « MULTI VOIES » afin de décrire plus précisément le champ utilisé par la GTD lors du calcul de l’interaction avec les entailles.
-
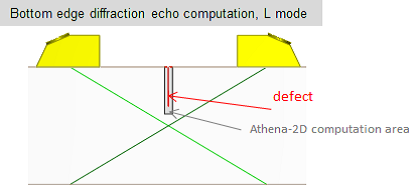
le modèle « 2D » de couplage de CIVA avec ATHENA pour les échos de bord bas des défauts plans et multi-facettes. La boite entourant l’entaille est toujours la même ; c’est une boîte de largeur 2mm et de hauteur 17mm (cf. figure ci-dessous, cas d’une inspection TOFD L60°).
?
- Enfin les modes 3D ont été sélectionnés dans CIVA, à la fois pour le calcul de champ et le calcul d’écho.
Pamètres des entailles
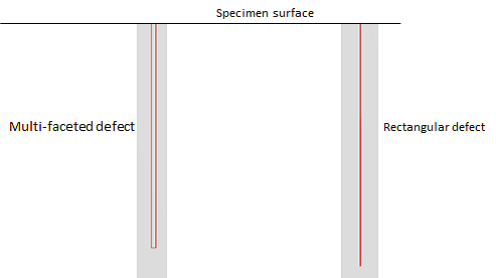
Les entailles sont décrites par des défauts de type «plan rectangulaire » dont l’ouverture est quasi nulle. Cette description ne correspond pas à la réalité car l’ouverture réelle des entailles est d’environ 0.2mm. Cependant, le modèle GTD (Geometrical Theory of Diffraction) de calcul des échos de diffraction n’est valide que pour des défauts d’ouverture quasi-nulle. Les conséquences de cette approximation dans la description des entailles seront étudiées en utilisant des défauts de type « multi-facettes » (Figure ci-dessous) décrivant plus fidèlement les entailles mais pour lesquels les échos de diffraction ne pourront être calculés qu’en « 2D » avec le modèle de couplage de CIVA-ATHENA.
COMPARAISON D'AMPLITUDE ET TEMPS DE VOL
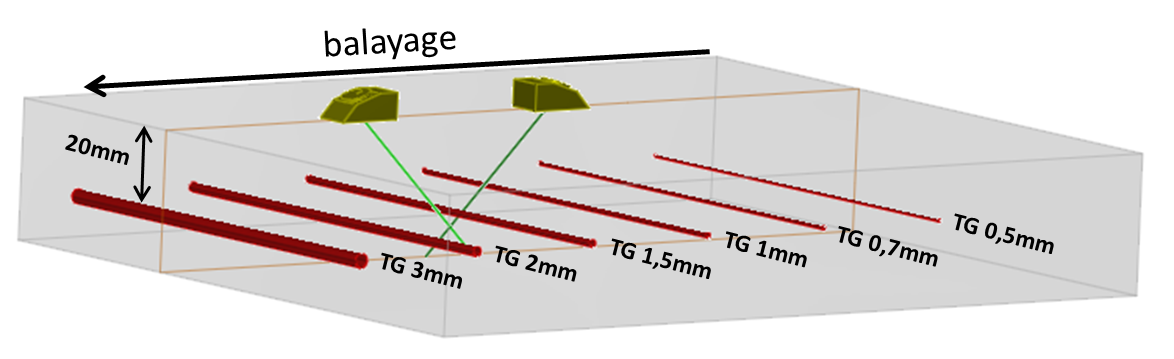
Les amplitudes des échos qui sont comparées dans cette page sont les amplitudes maximales du signal redressé. Elles ont été mesurées expérimentalement et simulées avec CIVA. La référence pour comparer les amplitudes expérimentales et simulées est l’amplitude maximum de l’écho direct L d’un trou génératrice (TGref) obtenue pour une PCS de Y mm. La valeur de PCS sera explicitée pour chaque couple de capteurs. Le TG de référence se trouve à la même profondeur que 6 autres TG de différents diamètre dans un bloc en acier ferritique de hauteur 30mm (cf. figure ci-dessous). Les temps de vol des échos qui seront comparés dans ce document sont des temps de vol absolus mesurés au maximum d’amplitude du signal redressé. Continuer vers Résultats sur les trous génératrices Retourner à TOFDAmplitudes

Temps de vol