
Informations sur les modèles spéculaire, SOV et SOV complet
Lors d’un calcul d’écho, l’application du principe de réciprocité consiste à calculer pour chaque point du défaut, le champ en émission, le champ réception, et un coefficient de diffraction, adapté au mode de contrôle.
Dans l’implémentation actuelle, CIVA considère les champs en émission et en réception comme étant des fronts d’onde plans dont on ne va extraire qu’un temps de vol, une amplitude, une phase, une direction de propagation et une polarisation (méthode dite d’extraction de champ max). Or, lorsque le défaut est situé en champ proche, ou lorsque le champ propagé sur le défaut comporte plusieurs contributions, par exemple suite à une réflexion sur différentes partie de la pièce, cette approximation n’est plus valide. De même, lors d’un calcul avec un capteur multi-éléments, les effets liés à la présence de lobes de réseau ne sont pas pris en compte.
Le principe des modèles « SOV_COMPLET » et « KIRCHHOFF_COMPLET » est de s’affranchir de cette limitation en ne simplifiant plus la description du champ mais en exploitant directement les rayons issus des capteurs en émission et en réception.
Le modèle SOV
L’interaction faisceau/inclusion sphérique est calculée en considérant une onde plane incidente sur l’inclusion sphérique (Figure 1). Cette approximation « onde plane» consiste à décrire le champ incident sur l’inclusion sphérique par un temps de vol, une amplitude, une phase, une direction de propagation et une polarisation (méthode dite d’extraction de champ max).
Ces caractéristiques du champ sont calculées au centre de l’inclusion puis transmises au modèle SOV qui calcule l’écho 3D de l’inclusion.
La phase de l’écho de la sphère, calculée en utilisant des coefficients de diffraction « 3D », tient compte du décalage de temps de vol entre le point brillant de l’inclusion et son centre (Figure 1). L’écho obtenu est correctement positionné au niveau du point brillant de la sphère.
Le modèle SOV est un modèle exact qui inclut :
- l’écho spéculaire de la sphère
- la contribution de l’onde rampante
- et des ondes pénétrant et se propageant dans la sphère.
Remarque : ce qui est valable pour le champ incident l’est aussi pour le champ en réception de part le principe de réciprocité utilisé pour calculer les échos avec le modèle SOV.
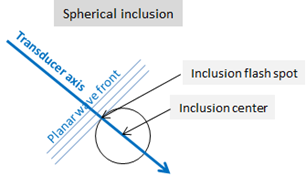
Figure 1 : Schéma de l’interaction faisceau/inclusion, modèle SOV.
Le modèle SOV n’est pas valide pour les grands ka, en raison de problèmes numériques dans le calcul des coefficients.
L’approximation « onde plane » n’est pas valide quand la sphère est grande
Par exemple, la Figure 2 illustre la limite de validité de l’approximation « onde plane » dans le cas d’une sphère de grand rayon « a » par rapport à la dimension de la tâche focale du champ incident.
On voit que l’amplitude du champ incident varie sur la surface contribuant à l’écho de la sphère (appelée « zone spéculaire » et de taille arbitraire sur la figure). Or, ces variations ne sont pas prises en compte car le modèle SOV considère que l’amplitude de l’onde plane incidente est celle mesurée au centre de la sphère.
Cette approximation de l’amplitude du champ incident est valide tant que la zone spéculaire de la sphère (liée à son rayon, à la dimension et à la position du capteur par rapport à la sphère) n’est pas trop grande par rapport au faisceau.
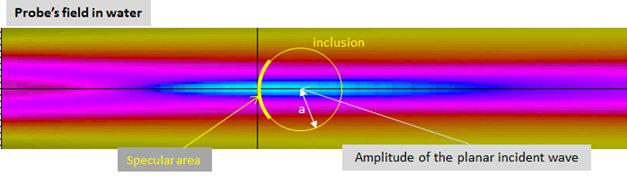
Figure 2 : Schéma de l’interaction faisceau/inclusion, illustration d’une limite de validité du modèle SOV due à l’approximation « onde plane ».
L’approximation consistant à utiliser le champ incident au centre de la sphère n’est pas valide quand la sphère est grande. En effet, même si le champ incident varie peu sur la surface contribuant à l’écho de la sphère, le fait d’utiliser l’amplitude et la direction du champ incident calculé au centre de la sphère alors que l’écho est généré par la zone spéculaire autour du point brillant peut induire une erreur. Cette approximation est valide tant que les champs incidents au point brillant et au centre de la sphère ne sont pas trop différents, c’est-à-dire tant que le rayon « a » de la sphère n’est pas trop grand par rapport aux variations du champ entre le point brillant et le centre (Figure 3).
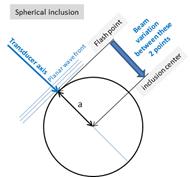
Figure 3 : Schéma de l’interaction faisceau/inclusion, illustration d’une limite de validité du modèle SOV due à l’approximation « onde plane ».
Cette limite de validité de l’approximation onde plane liée à la dimension de la sphère par rapport à la tâche ou à la longueur focale du faisceau a été illustrée en considérant l’amplitude du champ car cela est simple à visualiser. Mais elle concerne de la même façon la direction de propagation, le temps de vol et la phase du champ incident.
L’approximation « onde plane » n’est pas valide quand la sphère est située en champ proche ou lorsque le champ propagé sur le défaut comporte plusieurs contributions, par exemple suite à une réflexion sur différentes partie de la pièce.
Ces limites sont dues à la prise en compte d’un seul temps de vol pour décrire le champ incident.
Ces exemples de limites du modèle SOV mettent en évidence qu’il est difficile de trouver un critère simple pour définir le domaine de validité du modèle.
Des bridages existent dans CIVA pour traduire les limites liées à la taille de la sphère par rapport aux grandeurs caractéristiques du champ incident. Ces bridages reposent sur la valeur du rapport entre le rayon de la sphère et la longueur d’onde des ondes incidentes car elle est liée aux caractéristiques du champ. Cette valeur ne doit pas dépasser un seuil défini empiriquement.
Les limites du modèle SOV liées à la prise en compte d’un seul temps de vol ne sont pas traduites par des bridages dans CIVA.
Le modèle SOV Complet
Avec le modèle SOV, lors du calcul de l’écho de la sphère, le champ global incident (c’est-à-dire le champ formé par l’ensemble des rayons issus du capteur) sur l’inclusion est approché par une onde plane.
Avec le modèle SOV_COMPLET, c’est le champ associé à chaque rayon issu d’une surface élémentaire du capteur qui est approché par une onde plane (Figure 4). Comme pour SOV, chaque onde plane est décrite par un temps de vol, une amplitude, une phase, une direction de propagation et une polarisation. Ces caractéristiques sont calculées au centre de l’inclusion puis transmises au modèle SOV qui calcule l’écho 3D de l’inclusion pour chaque rayon. Puis les échos obtenus pour chaque rayon sont sommés pour obtenir l’écho final de l’inclusion.
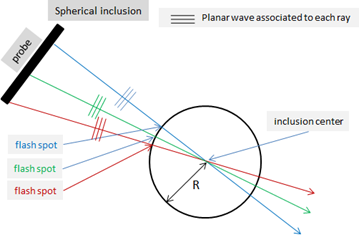
Figure 4 : Schéma de l’interaction faisceau/inclusion, modèle SOV_COMPLET.
Des considérations similaires à celles du modèle SOV déterminent les limites de validité du modèle SOV_COMPLET. Cependant, le fait de considérer autant d’ondes planes que de rayons entraîne moins de limitations.
Par exemple, le champ associé à un rayon est n’est pas focalisé et varie peu sur la surface spéculaire de la sphère. La variation du champ d’un seul rayon entre le point brillant et le centre de la sphère est uniquement due à la divergence et varie moins que dans le cas du champ global d’un capteur focalisé. Un seul temps de vol suffit à le décrire; le problème de l’extraction d’un seul temps de vol ne permettant pas de décrire correctement le champ proche global d’un capteur, n’existe plus.
Par contre, les limites dues au recouvrement spectral sont les mêmes que pour SOV.
Comparaison SOV vs SOV Complet
D’après les descriptions faites ci-dessus de ces deux modèles, le modèle SOV_COMPLET devrait permettre de mieux calculer les échos que SOV pour des sphères :
- situées en champ proche du capteur
- insonifiées par des contributions multiples
- de diamètre plus grand qu’avec le modèle SOV si on considère la limitation liée à la description du champ à la surface de la sphère. En revanche, la limite associée aux coefficients de diffraction qui sont faux pour les grands « ka » est la même que pour SOV.
En champ lointain, les prédictions des deux modèles sont proches car les rayons issus du capteur et pris en compte dans le modèle SOV_COMPLET sont parallèles à la surface des sphères dans la direction de l’onde plane associée au champ formé du capteur.
Le modèle spéculaire
Seul l’écho spéculaire est simulé. Il ne prend en compte que les rayons issus du capteur, réfléchis à la surface de la sphère et retournant au capteur. Les coefficients de réflexion de ces rayons à la surface de la sphère sont « 3D » et dépendent du milieu constituant la sphère.
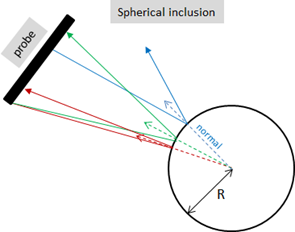
Figure 5 : Schéma de l’interaction faisceau/inclusion, modèle SPECULAIRE.
Les avantages de ce modèle, qui considère autant de champs élémentaires qu’il y a de rayons issus du capteur, sont les mêmes que pour le modèle SOV_COMPLET. De plus, le champ utilisé en entrée du modèle SPECILAIRE est calculé au niveau du point d’intersection de chaque rayon avec la surface de la sphère, là où l’écho se forme, et non plus au centre de celle-ci.
Par contre, ce modèle ne prend pas en compte les phénomènes de diffraction. Il n’est donc valide que pour les sphères grandes par rapport à la longueur d’onde.
Il ne calcule ni les ondes rasantes, ni les ondes pénétrant dans l’inclusion.