Capteurs et réflecteurs utilisés
- Largeur d’un élément : 0.5mm
- Elévation d’un élément: 10mm
- Pitch : 0.6mm
- Ouverture totale : 38.3 x 10 mm²
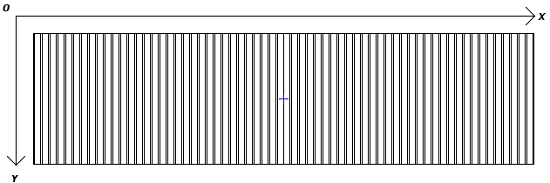
Figure 1 : Barrette linéaire 64 éléments, 38.3x10mm², 5MHz.
Les réflecteurs utilisés sont :
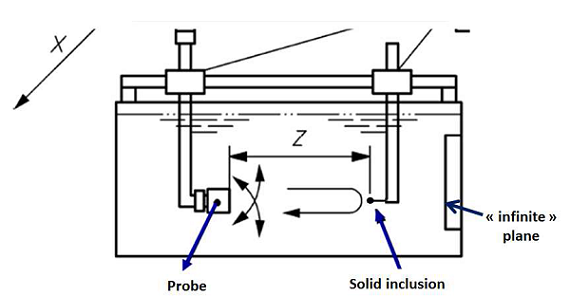
- une inclusion en acier inoxydable de diamètre 1mm
- et un « plan infini » (surface plane de grandes dimensions par rapport au faisceau ultrasonore).
Mesures réalisées
Des configurations avec et sans lois de retards ont été évaluées :
- Sans lois de retards : un séquençage de 20, 16, 12, 8, 4 ou 1 élément actif a été paramétré
- Avec lois de retards : plusieurs ouvertures actives ont été évaluées de 20, 32, 48 et 64 éléments. Une loi de retards a été paramétrée permettant de focaliser en L0° à 33mm de profondeur dans l’eau.
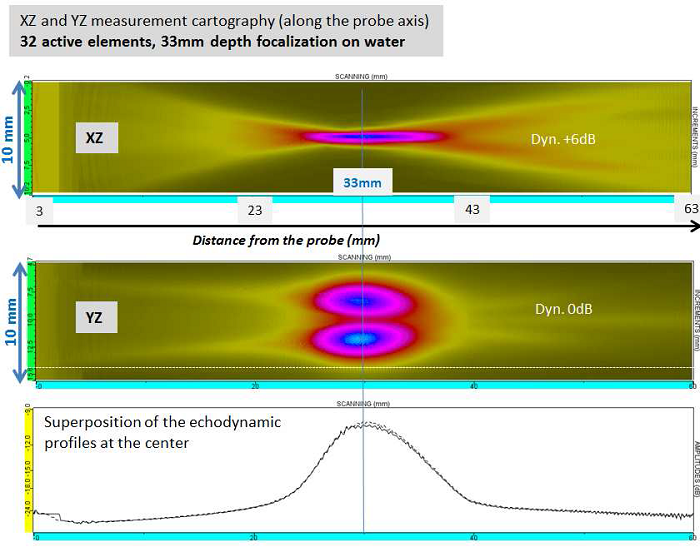
Cartographies dans les plans XZ et YZ et profil selon Z
Un exemple parmi les cartographies C-scans expérimentales obtenues sur l’inclusion de 1mm de diamètre est présenté Figure 3 dans les plans XZ et YZ. Il s’agit d’une configuration où 32 éléments du capteur multiéléments sont actifs et une loi de retards permettant de focaliser à 33mm dans l’eau paramétrée. Une superposition des courbes échodynamiques extraites aux centres des deux C-scans est affichée en dessous des cartographies.
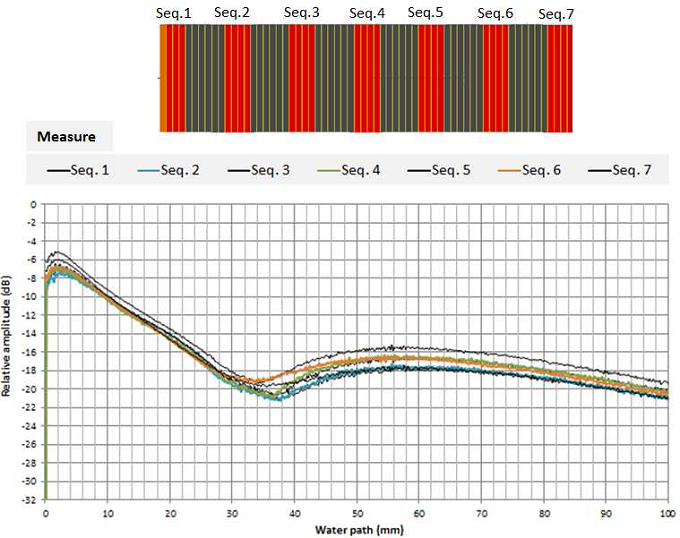
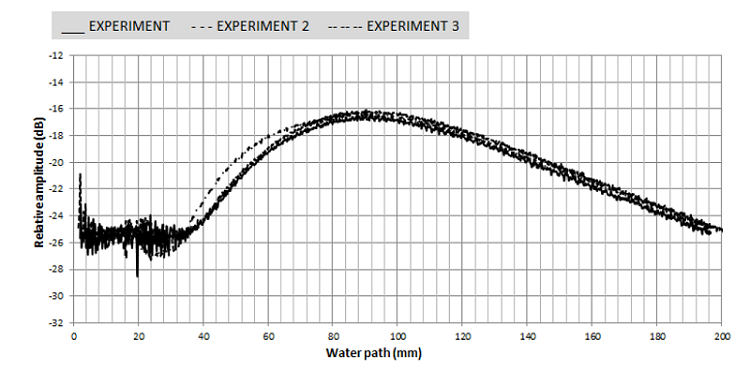
Pour les configurations sans loi de retards, un séquençage sur la barrette a été paramétré de manière à comparer les courbes amplitude/distance sur des éléments pris à différents endroits sur la barrette. Un exemple de superposition des profils axiaux dans le cas de 7 séquences de 4 éléments actifs est présenté Figure 4. La superposition montre une bonne reproductibilité entre chaque séquence avec une différence de sensibilité de l’ordre de 2dB.
Cartographies dans le plan XY
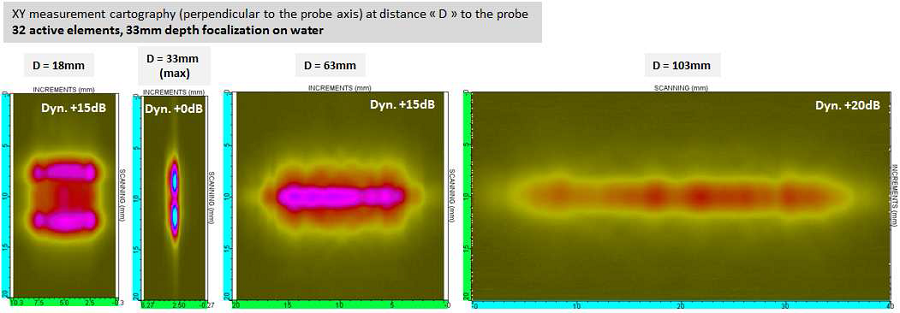
Des cartographies expérimentales dans le plan XY ont été acquises pour l’inclusion de 1mm de diamètre. Des exemples de cartographies expérimentales réalisées à des distances de 18, 33, 63 et 103 mm sont présentées Figure 5. Pour une meilleure visualisation des cartographies, les dynamiques ont été modifiées. Elle ne sont donc pas directement comparables. Il s’agit d’une configuration où 32 éléments du capteur multiéléments sont actifs et une loi de retards permettant de focaliser à 33mm dans l’eau est paramétrée.
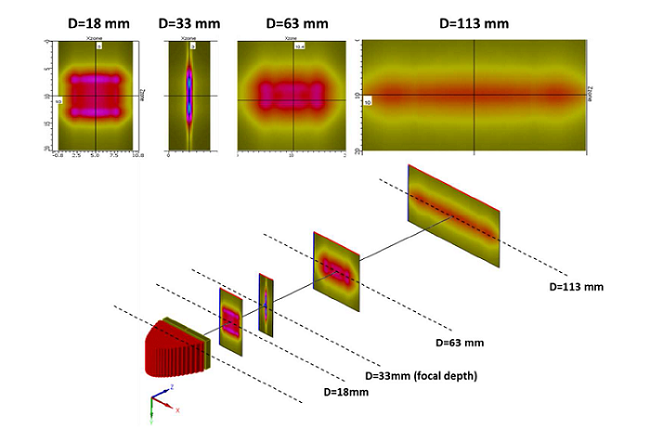
A titre d’illustration, les images ci-dessous correspondent au calcul de champ réalisé à ces mêmes positions (les dynamiques des différentes images sont modifiées, les images ne sont pas directement comparables aux cartographies expérimentales de la figure précédente). Ces images mettent en évidence les différences d’évolution du champ ultrasonore dans les deux directions (plan de la découpe et plan perpendiculaire). Dans la direction de la découpe du capteur (axe horizontal), la focalisation appliquée par la loi de retards à 33 mm conduit à une très grande variation de répartition de l’énergie ultrasonore en fonction de la profondeur, tandis que selon l’axe vertical (direction de l’élévation des éléments), l’allure du champ varie relativement peu compte tenu de la faible divergence du faisceau dans ce plan.
Des comparaisons quantitatives entre les champs mesurés et simulés sont données dans la suite.
Ajustement de l'orientation du capteur
Le dispositif expérimental est illustré Figure 7.
La procédure expérimentale adoptée pour le réglage de l’orientation du capteur multiéléments est décrite ci-dessous.
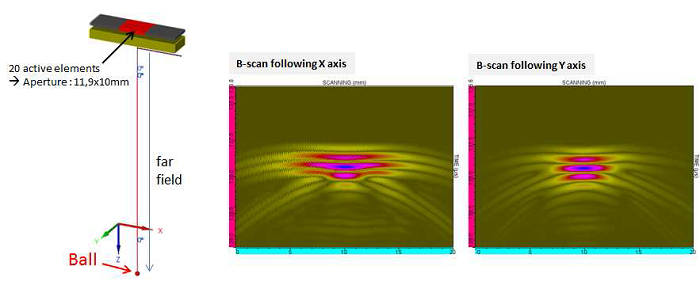
Pour assurer le réglage, il est nécessaire que l’écho mesuré soit situé dans le champ lointain du capteur. Pour cela, une ouverture active de 20 éléments sans application de loi de retards a été choisie. Dans ce cas, les dimensions de l’ouverture active sont presque identiques dans les deux plans du capteur et ainsi la limite de champ proche dans les deux plans du capteur est quasi identique.
La procédure permettant de régler précisément l’orientation du capteur consiste ensuite en une vérification systématique de la symétrie de l’écho de l’inclusion selon les axes X et Y (Figure 8). La correction de l’orientation est assurée par un goniomètre disposé sur le support traducteur.
Reproductibilité et incertitude expérimentale
Continuer vers Description des simulations
Retour vers Capteur multi-élément