PARAMÈTRES D'ENTRÉE DANS CIVA
- Diamètre du capteur : 9.5mm
La fréquence centrale du signal d’entrée est la fréquence nominale du capteur :
- Fréquence centrale = 10 MHz
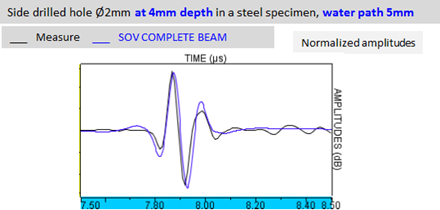
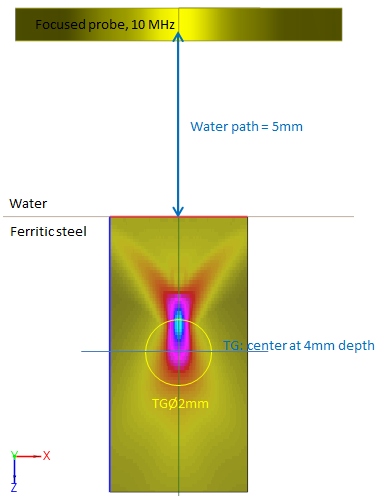
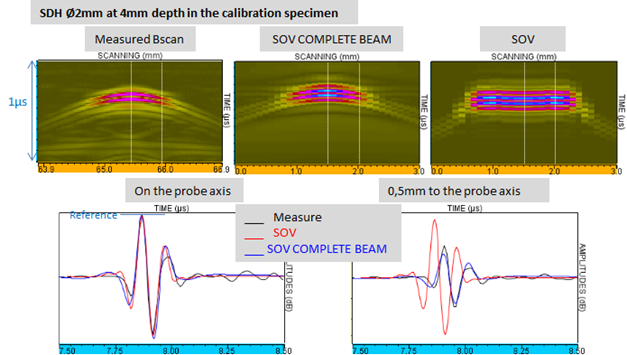
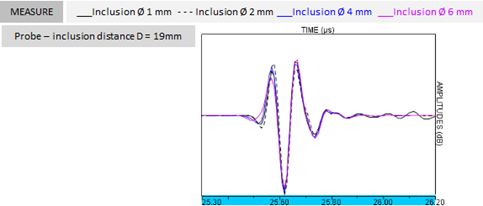
La bande passante et la phase du signal d’entrée sont déterminées par ajustement des formes temporelles des échos mesurés et simulés avec SOV_COMPLET (Figure 56) d’un trou génératrice TGØ2mm situé à 4mm de profondeur dans le bloc d’étalonnage en acier et obtenu pour une hauteur d’eau de 5mm.
La bande passante et la phase du signal d’entrée ainsi déterminées sont:
- Bande passante = 65%
- Phase = 300°
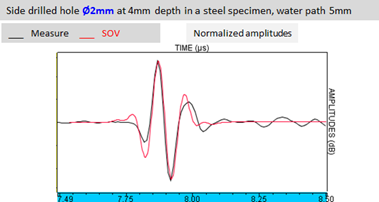
Ces valeurs conduisent aussi à un relativement bon accord entre les A-scans expérimentaux et simulés par SOV_COMPLET (Figure 56) et SOV (Figure 57) même si l’écho SOV_COMPLET est un peu trop « basse fréquence ».
Le rayon de courbure a été déterminé par ajustement de la distance focale prédite par le calcul de champ de CIVA avec celle indiquée par le fabriquant (0.8inch soit 20.3mm). Le champ du capteur dans l’eau après cet ajustement est représenté sur la Figure 58.
- Rayon de courbure = 20.5mm
L’atténuation dans l’eau a été prise en compte, la valeur du coefficient d’atténuation des ondes L dans l’eau à la fréquence de 10 MHz entrée dans CIVA est issue de la littérature:
- coeffAtténuation = 0.022 dB/mm
RÉFÉRENCE POUR LES AMPLITUDES LORS DES COMPARAISONS MESURE/CIVA
Choix de la référence
Le choix de la référence pour les amplitudes a posé un problème pour ce capteur pour 3 raisons :
- Contrairement aux deux capteurs plans précédents, les échos de réflecteurs de référence habituels (TGs ou TFPs ) simulés avec des capteurs focalisés n’ont pas encore été validés expérimentalement.
- Les échos des TGs simulés avec SOV et SOV_COMPLET ne sont pas identiques même pour les TGs placés à la focale du champ dans la pièce.
- Les rapports d’amplitude entre les échos les TGs et TFPs des blocs d’étalonnage obtenus avec CIVA ne sont pas en accord avec la mesure. Par conséquent, suivant le choix du réflecteur de référence, TG ou TFP, on observe un écart entre les amplitudes des inclusions expérimentales et simulées.
Pour ces raisons il a été décidé :
- de choisir un TG comme référence plutôt qu’un TFP pour être homogène avec les références des capteurs précédents et pour évaluer par des mesures complémentaires la validité des échos du TG simulés avec SOV et SOV_COMPLET.
- de choisir comme référence pour les amplitudes des échos des inclusions obtenus avec un modèle SOV (ou SOV_COMPLET) l’amplitude de l’écho du TG de référence obtenu avec ce modèle SOV (ou. SOV_COMPLET). On rappelle que pour les 2 capteurs plans précédents, les modèles SOV et SOV_COMPLET prédisaient la même amplitude pour l’écho de référence et par conséquent cette distinction n’avait pas été nécessaire. Pour les amplitudes des échos des inclusions obtenues avec SPECULAIRE l’amplitude de l’écho du TG obtenu avec SOV_COMPLET servira de référence (les échos de TGs ne peuvent pas être calculés avec SPECULAIRE dans CIVA).
- d’indiquer les écarts entre les rapports d’amplitude TGs/TFPs mesurés et simulés et de représenter quelques résultats de comparaison des courbes amplitude/distance expérimentales et simulées des inclusions quand un TFP est utilisé comme référence.
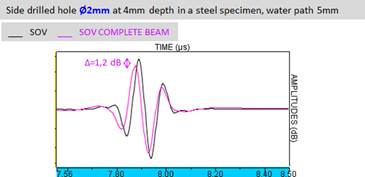
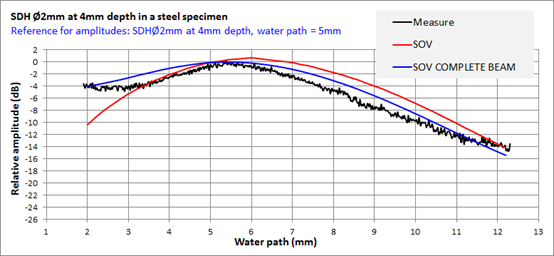
La référence est l’amplitude de l’écho spéculaire L0° du TGØ2mm situé à 4mm dans le bloc d’étalonnage inspecté avec une hauteur d’eau de 5mm. Pour ce TG de référence qui a servi à déterminer les phases et bande passante du signal d’entrée, les modèles SOV et SOV_COMPLET simulent des échos de forme très proche mais pas d'amplitude différente (Figure 59). Par conséquent :
- la référence pour les amplitudes des échos des inclusions obtenus avec SOV est l’amplitude de l’écho du TG de référence obtenu avec ce modèle.
- la référence pour les amplitudes des échos des inclusions obtenus avec SOV_COMPLET et SPECULAIRE et des échos du plan infini obtenus avec SPECULAIRE est l’amplitude de l’écho du TG de référence obtenu avec SOV_COMPLET.
Validation expérimentale de l'écho de référence du TG
Pour cette validation des courbes amplitude/distance et des courbes XY expérimentales et simulées du TG de référence ont été comparées.
-
Courbe amplitude/distance, cas du réflecteur de référence
La courbe amplitude/distance simulée avec SOV_COMPLET pour le TG de référence est très proche de celle mesurée tandis que celle simulée avec SOV s’écarte de plus de 2dB de la mesure (Figure 60).
-
Courbe XY, cas du réflecteur de référence
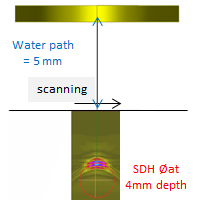
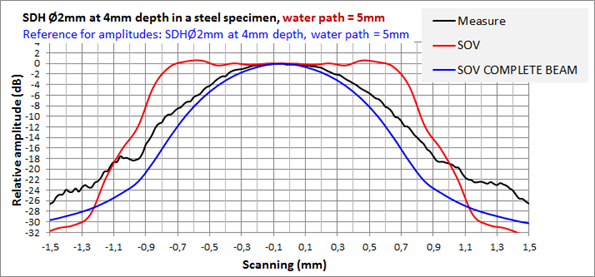
La courbe XY a été acquise pour une hauteur d’eau de 5mm choisie pour que le point brillant du TG se situe à la distance focale dans le bloc d’étalonnage (Figure 61). La configuration est représentée Figure 62.
La courbe XY simulée avec le modèle SOV n’est pas du tout en accord avec la mesure quand le TG s’éloigne de l’axe du capteur (Figure 63, courbe rouge). En revanche, la forme de la courbe SOV_COMPLET est beaucoup plus proche de la mesure même si les écarts dépassent 2dB quand l’inclusion est décalée au-delà de 0.5mm de l’axe du capteur (Figure 63, courbe bleue). Les B-scans et A-scans présentés sur la Figure 65 illustrent également les écarts plus importants pour SOV et qui s’expliquent par le fait que l’approximation onde plane que suppose le modèle n'est plus aussi valide lorsque leTG s’éloigne de l’axe du capteur.
Malgré ces écarts entre la mesure et les simulations SOV et SOV_COMPLET pour le TG de référence, ce TG a été choisi comme référence faute de disposer d’une « meilleure » référence.
CHAMP DU CAPTEUR focalisé 10 MHZ DANS L'EAU
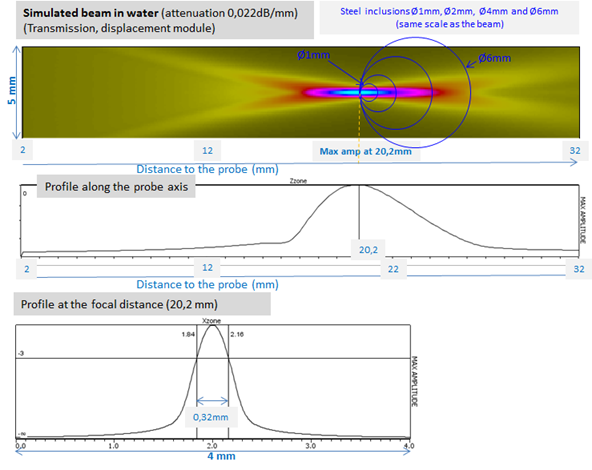
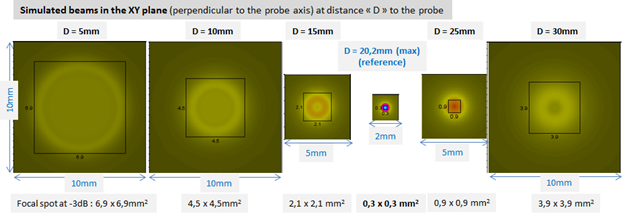
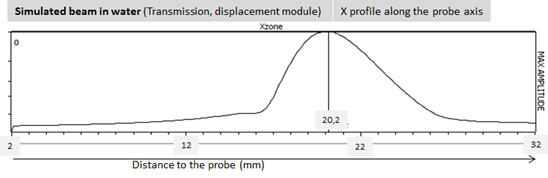
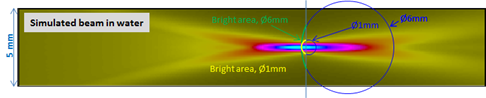
L’amplitude maximale émise par le capteur sur son axe est située à 20.2mm de distance. La largeur de la tâche focale à -3dB, pour cette distance, est de 0.3mm.
Toutes les billes sont donc beaucoup plus grandes que la tâche focale (Figure 65 en haut).
RÉSULTATS OBTENUS POUR LES INCLUSIONS EN ACIER
|
10MHZ |
Inclusion Ø 1mm |
Inclusion Ø 2mm |
Inclusion Ø 4mm |
Inclusion Ø 6mm |
|
SOV |
non |
non |
non |
non |
|
SOV_COMPLET |
non |
non |
non |
non |
|
SPECULAIRE |
oui |
oui |
oui |
oui |
RÉSULTATS EXPÉRIMENTAUX
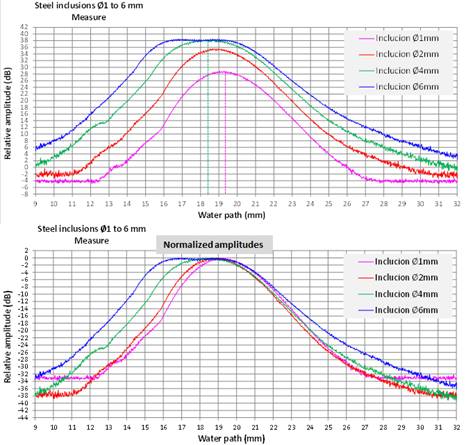
Les courbes échodynamiques amplitude/distance expérimentales obtenues pour les 4 inclusions sont présentées sur la Figure 67. Sur le graphe du haut, les amplitudes sont relatives à celles de l’écho de référence (Trou Génératrice (TG)); en bas les amplitudes sont normalisées.
- L’amplitude maximum des échos augmente de 6 dB environ lorsque le diamètre de l’inclusion passe de 1 à 2mm. L'augmentation est de 2dB lorsque le diamètre passe de 2 et 4mm. L'amplitude n’augmente pas entre les inclusions de 4 mm et 6mm.
- La distance « dmax » à laquelle l’amplitude de l’écho est maximale dépend du diamètre de l’inclusion (cf tableau plus loin).
Les courbes coupes XY expérimentales obtenues pour les 4 inclusions à la focale expérimentale sont présentées sur la Figure 68 (amplitudes normalisées).
- La largeur de la tâche focale dépend du diamètre de l’inclusion.
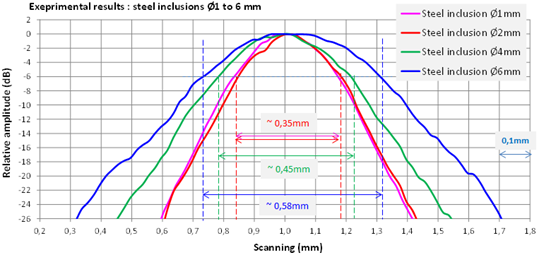
- En revanche, la forme des échos spéculaires des inclusions de diamètre 1 à 6mm situées à 19mm ne dépend quasiment pas du diamètre de l’inclusion (Figure 69).
COMPARAISON MESURE/CIVA
-
Courbe amplitude distance
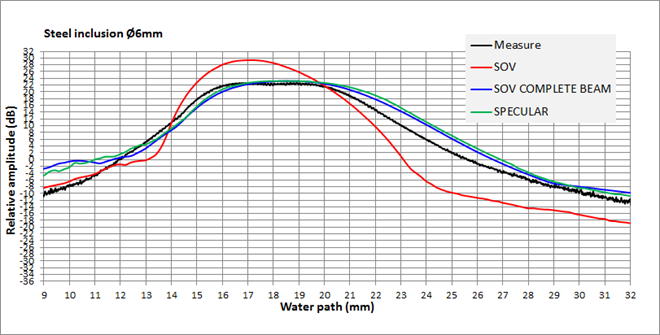
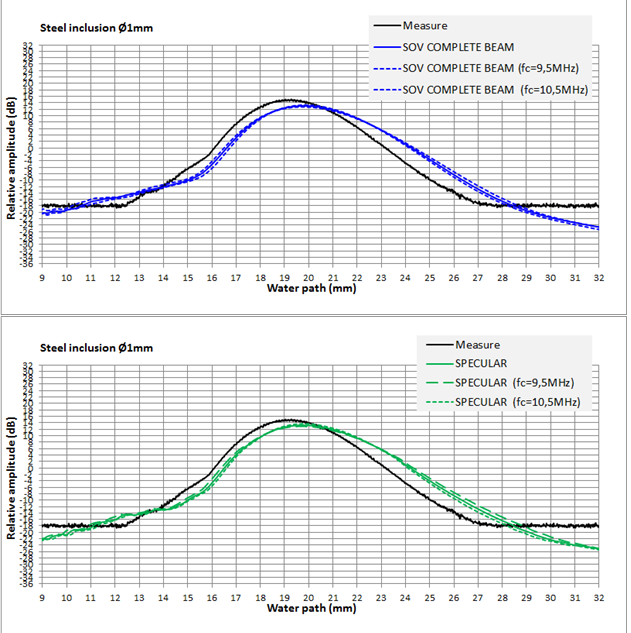
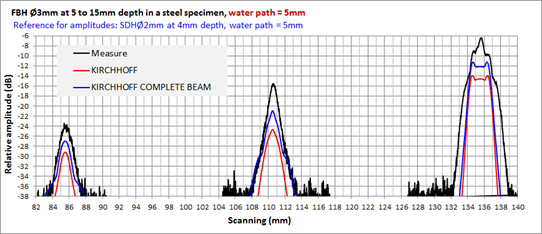
Les comparaisons des courbes amplitude/distance expérimentales et simulées avec les trois modèles SOV-COMPLET, SOV et SPECULAIRE été étudiées pour tous les diamètres d'inclusion. La Figure 70 montre les résultats obtenus avec l'inclusion Ø1mm. La Figure 71 montre les résultats obtenus avec l'inclusion Ø6mm.
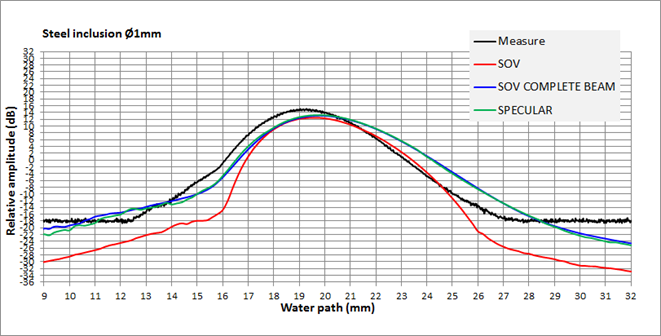
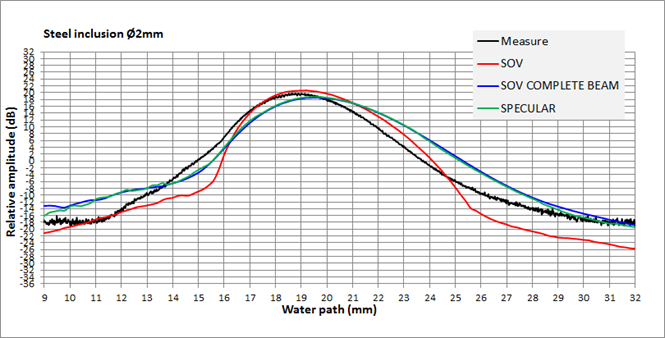 Figure 71 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET et SPECULAIRE, cas de l’inclusion de 1mm. Référence pour les amplitudes: écho L0° d’un TGØ2mm à 4mm de profondeur dans la cale d’étalonnage, hauteur d’eau 5mm. Dans la version commerciale de CIVA, seul le modèle SPECULAIRE est autorisé pour l’inclusion de 1mm. Capteur focalisé Ø9.5mm, rayon courbure 205mm, 10MHz.
Figure 71 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET et SPECULAIRE, cas de l’inclusion de 1mm. Référence pour les amplitudes: écho L0° d’un TGØ2mm à 4mm de profondeur dans la cale d’étalonnage, hauteur d’eau 5mm. Dans la version commerciale de CIVA, seul le modèle SPECULAIRE est autorisé pour l’inclusion de 1mm. Capteur focalisé Ø9.5mm, rayon courbure 205mm, 10MHz.
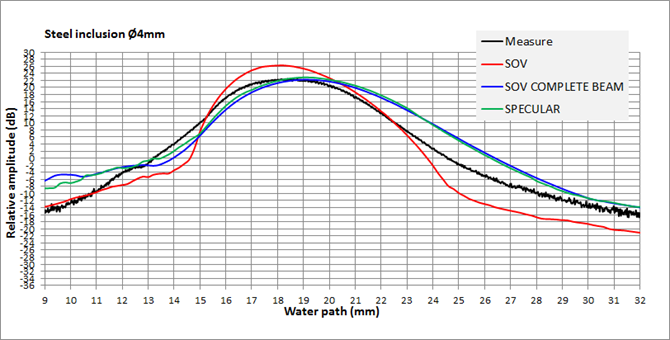 Figure 72 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET et SPECULAIRE, cas de l’inclusion de 1mm. Référence pour les amplitudes: écho L0° d’un TGØ2mm à 4mm de profondeur dans la cale d’étalonnage, hauteur d’eau 5mm. Dans la version commerciale de CIVA, seul le modèle SPECULAIRE est autorisé pour l’inclusion de 4mm. Capteur focalisé Ø9.5mm, rayon courbure 205mm, 10MHz.
Figure 72 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET et SPECULAIRE, cas de l’inclusion de 1mm. Référence pour les amplitudes: écho L0° d’un TGØ2mm à 4mm de profondeur dans la cale d’étalonnage, hauteur d’eau 5mm. Dans la version commerciale de CIVA, seul le modèle SPECULAIRE est autorisé pour l’inclusion de 4mm. Capteur focalisé Ø9.5mm, rayon courbure 205mm, 10MHz.
La distance dmax à laquelle l’amplitude de la courbe amplitude/distance est maximale est indiquée dans le Tableau 13.
Les écarts entre dmaxEXPERIMENTAL et dmaxCIVA sont indiqués dans le Tableau 14.
|
Distance “D” of amp max (mm) |
Simulated beam |
Inclusion Ø1mm |
Inclusion Ø2mm |
Inclusion Ø4mm |
Inclusion Ø6mm |
|
|
20.2 |
|
|
|
|
|
Measure |
|
19.3 |
19.1 |
18.6 à 18.9 |
17 à 19.5 |
|
SOV |
|
19.4 |
19.2 |
18.2 |
17 |
|
SOV_COMPLETE_BEAM |
|
19.8 |
19.6 |
19 à 19.2 |
18 à 19.5 |
|
SPECULAR |
|
19.8 |
19.6 |
19 à 19.2 |
18 à 19.5 |
|
Δdistance of amp max ΔDsim/exp (mm) |
Inclusion Ø1mm |
Inclusion Ø2mm |
Inclusion Ø4mm |
Inclusion Ø6mm |
|
SOV |
- |
- |
- |
- |
|
SOV_COMPLETE_BEAM |
0.5 |
0.5 |
0.4 |
0.5 |
|
SPECULAR |
0.5 |
0.5 |
0.4 |
0.5 |
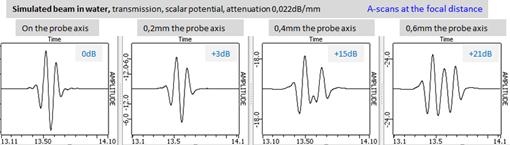
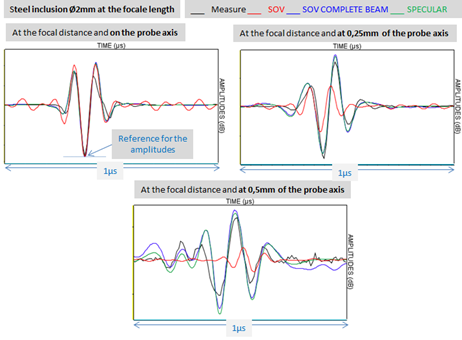
Modèle SOV : les formes des courbes amplitude/distance expérimentales et simulées avec le modèle SOV sont très différentes. La différence augmente lorsque le diamètre de l’inclusion augmente. En effet, la surface de l’inclusion contribuant à l’écho augmente tout comme la partie de l'inclusion se situant hors axe du capteur (Figure 74) pour laquelle l’approximation onde plane ne permet pas de décrire correctement le champ incident. Des A-scans du champ émis dans l’eau pour 4 points situés à la profondeur de la focale (un point sur l’axe du capteur et trois autres décalés de l’axe de 0.2, 0.4 et 0.6mm) ont été représentés (Figure 75) pour illustrer la forme complexe du signal quand le point d'observation s’écarte de l’axe.
Modèle SOV_COMPLET et SPECULAIRE : ces deux modèles donnent quasiment les mêmes résultats. Les formes des courbes amplitude/distance SOV_COMPLET et SPECULAIRE sont beaucoup plus proches des courbes expérimentales que les courbes SOV. Cependant, on obtient un écart de 0.5mm environ entre les distances dmaxEXPERIMENTAL et dmaxSOV_COMPLET (ou dmaxSPECULAIRE qui est identique) (Tableau 13 et Tableau 14) et des écarts très importants en amplitude pour les distances supérieures dmax. Ces écarts qui peuvent atteindre 8dB sont en partie dus au décalage de dmax.
Ces comparaisons expérience/simulations mettent en évidence l’apport de SOV_COMPLET par rapport à SOV. Elles montrent aussi que les bridages actuels de CIVA sont justifiés pour SOV mais pas nécessairement pour SOV_COMPLET qui donne des résultats proches de SPECULAIRE. Les bridages pour SOV_COMPLET existent pour éviter les problèmes numériques de calculs des coefficients (suspectés d’être à l’origine d’écarts observés pour les grandes inclusions). Une analyse plus détaillée de ce problème pourrait permettre de mieux définir les bridages de SOV_COMPLET qui devraient a priori être moins stricts que ceux de SOV.
-
Cartographies dans le plan XY à la distance focale
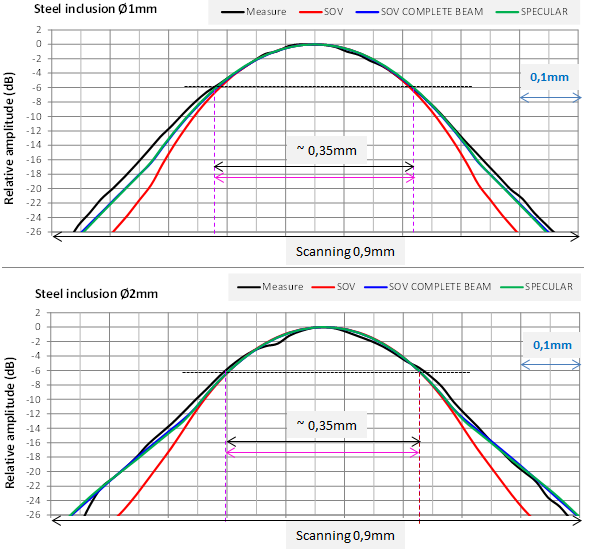
Pour chaque inclusion, les courbes XY expérimentales ont été extraites à la distance pour laquelle le maximum d’amplitude a été observé dans le plan XZ (=dmaxEXPERIMENTAL). Les courbes XY simulées ont été extraites aux mêmes positions. Ces courbes sont normalisées en amplitude (amplitude max = 0dB). Les comparaisons (Figure 76 (inclusions Ø1 et 2mm) et Figure 77 (inclusions Ø4 et 6mm)) montrent :
- Inclusions Ø1 et 2mm :
- un bon accord avec la mesure pour les SOV_COMPLET et SPECULAIRE sur l’ensemble balayage (0.8mm environ).
- un bon accord avec la mesure pour SOV uniquement quand les inclusions sont situées à moins de 0.2 mm de l’axe du capteur, au-delà SOV sous-estime les amplitudes.
- les largeurs des tâches focales simulées avec les trois modèles de CIVA à -6dB sont proches de la mesure : 0.35mm.
- Inclusions Ø4 et 6mm :
- les 3 modèles prédisent mal les amplitudes des échos des inclusions quand elles s’éloignent de l’axe du capteur.
- Dans le cas du modèle SOV cela est en partie dû au fait que l’approximation onde plane est moins valide lorsque le TG s’éloigne de l’axe du capteur.
- Dans le cas des modèles SOV_COMPLET et SPECULAIRE la forme des courbes XY présente un « décrochage » qui n’est pas observé expérimentalement et qui semble à l’origine des écarts avec la mesure. Les largeurs des tâches focales expérimentales sont 0.45mm et 0.58mm pour les inclusions de Ø 4 et 6mm alors que selon SOV_COMPLET et SPECULAIRE elles sont de 0.33 et 0.34mm.
- les 3 modèles prédisent mal les amplitudes des échos des inclusions quand elles s’éloignent de l’axe du capteur.
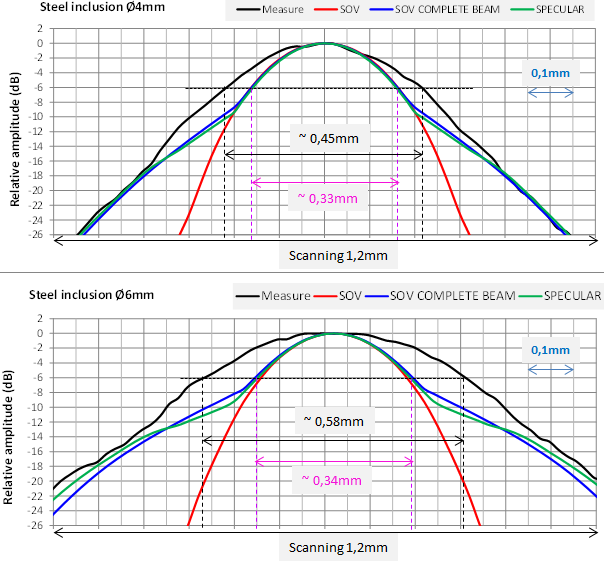
Le faible « décrochage » observé sur les courbes XY prédites par SOV_COMPLET et SPECULAIRE pour les inclusions de Ø4 et 6mm est obtenu quand le centre de l’inclusion est décalé de 0.2mm par rapport à l’axe du capteur. Il ne semble pas lié à un « décrochage » des amplitudes du champ émis dont la décroissance de part et autre de l’axe du capteur à la distance focale est très régulière (Figure 78). Son origine reste à étudier.
La comparaison des Ascans expérimentaux et simulés avec les 3 modèles confirment que les prédictions de SOV_COMPLET et SPECULAIRE sont plus justes que celles simulées avec SOV quand l’inclusion n’est pas sur l’axe du capteur (Figure 79).
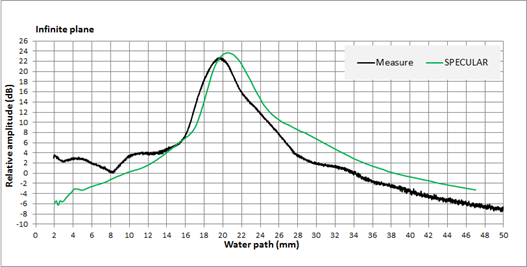
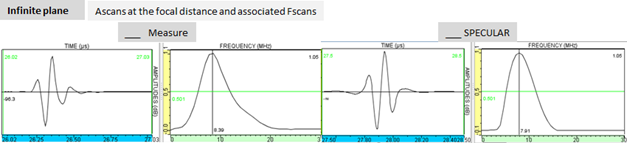
RÉSULTATS OBTENUS POUR LE PLAN INFINI
SPECTRE DES ÉCHOS DES petites INCLUSIONS ET DU PLAN INFINI
- des spectres mesurés et simulés avec le modèle SPECULAIRE du plan infini aux distances respectives dmaxEXPERIMENTAL et dmaxSPECULAIRE (Tableau 15).
- des spectres mesurés et simulés avec le modèle SOV_COMPLET et SPECULAIRE des inclusions de Ø1mm et Ø4mm, respectivement aux distances dmaxEXPERIMENTAL , dmaxSOV_COMPLET et dmaxSPECULAIRE (Tableau 16).
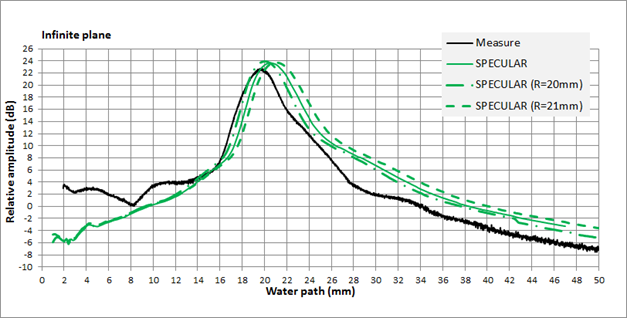
Plan infini : la fréquence centrale prédite par le modèle SPECULAIRE est proche de celle mesurée mais est éloignée de la fréquence nominale du capteur (environ 8MHz au lieu de 10MHz). Les bandes passantes mesurées et simulées avec le modèle SPECULAIRE sont aussi très proches. L’ensemble des spectres expérimentaux et simulés avec le modèle SPECULAIRE (Figure 81) montre un contenu fréquentiel un peu différent.
|
Infinite plane at the focale distance |
||
|
|
fc (MHz) |
BW (MHz) |
|
Measure |
8.4 |
6.5 |
|
SPECULAR |
7.9 |
6.3 |
Comme vu précédemment, les échos des inclusions simulés avec le modèle SOV_COMPLET et SPECULAIRE, situées à dmaxSPECULAIRE (= dmaxSOV8COMPLET) sont semblables. La fréquence centrale et la bande passante extraites de leurs spectres sont également très proches de celles mesurées (Tableau 16).
|
|
Steel inclusion Ø1mm at the focal distance |
Steel inclusion Ø4mm at the focal distance |
||
|
|
fc (MHz) |
BW (MHz) |
fc (MHz) |
BW (MHz) |
|
Measure |
8.9 |
6.8 |
8.6 |
6.2 |
|
SOV-COMPLETE-BEAM |
9 |
6.4 |
8.6 |
6.3 |
|
SPECULAR |
8.8 |
6.5 |
8.4 |
6.2 |
EFFET D'UNE FAIBLE VARIATION DE LA FRÉQUENCE CENTRALE
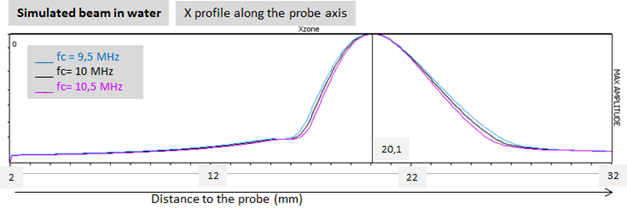
Pour chacune des 2 nouvelles fréquences (9.5 et 10.5MHz) le rayon de courbure du capteur à entrer dans CIVA doit être déterminé selon la méthode (décrite dans le chapitre description des simulations). Elle consiste à ajuster la valeur du rayon de courbure de sorte que la distance focale dans l’eau selon un calcul de champ CIVA soit celle indiquée par le fabriquant. Comme la position du maximum d’amplitude du champ émis par le capteur dans l’eau sur son axe ne change pas quand la fréquence centrale du capteur est modifiée de 0.5MHz (Figure 82), les rayons de courbure à entrer pour les calculs à 9.5MHz et 10.5MHz sont les mêmes que celui déterminé à 10MHz.
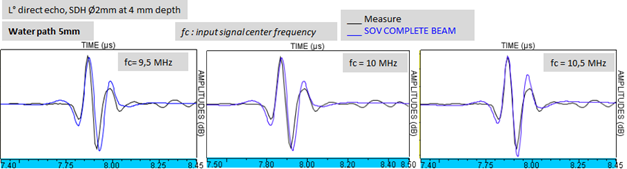
L’accord expérience/simulation pour l’écho de référence (TGØ2mm à la profondeur de 4mm inspecté avec une hauteur d’eau de 5mm) pour les 3 fréquences (9.5MHz, 10MHz et 10.5MHz) est vérifié (Figure 83). L’écho du TG obtenu avec le signal d’entrée à 10MHz était déjà un peu trop basse fréquence; l’écart SOV_COMPLET/mesure est donc augmenté avec le signal d’entrée à 9.5MHz et réduit avec celui à 10.5MHz. L’accord mesure/SOV_COMPLET aux 3 fréquences est assez satisfaisant pour calculer les courbes amplitude/distance et XY.
Les courbes amplitude/distance calculées avec les modèles SOV_COMPLET et SPECULAIRE pour les 3 fréquences sont représentées Figure 84 pour l'inclusion de 1mm. La référence pour les amplitudes de chaque courbe amplitude/distance obtenue à une fréquence donnée est celle de l’écho du TG obtenu à la même fréquence.
Ces résultats montrent que la variation de fréquence centrale entraine de faibles variations qui ne remettent pas en cause les observations et conclusion faites jusqu’ici avec le signal d’entrée à 10MHz.
Effet d'une faible variation de courbure de la pastille
Pour ces 2 nouveaux rayons de courbure de 20 et 21mm, les distances focales dans l’eau sont respectivement égales à 19.6mm et 20.6mm. Elle était de 20.2mm pour le rayon de 20.5mm.
Résultats obtenus avec 3 rayons de courbure proches
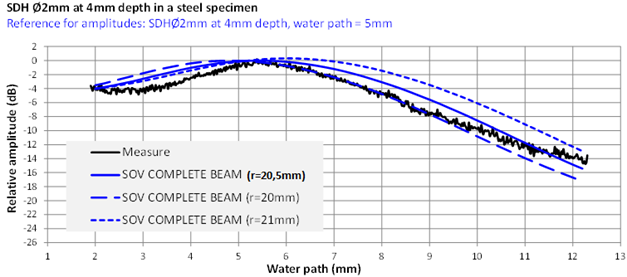
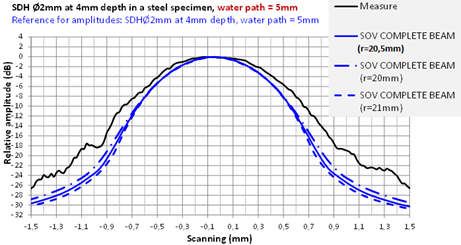
Les courbes amplitude/distance expérimentales et calculées avec le modèle SOV_COMPLET pour les 3 rayons de courbure sont tracées Figure 83 (inclusion de Ø1mm, 4mm et 6mm). La référence pour les amplitudes de chaque courbe est celle de l’écho du TG obtenu avec le même rayon de courbure.
Ces résultats montrent que la variation du rayon de courbure a des effets importants sur les courbes. Pour les 3 inclusions, les prédictions de SOV_COMPLET avec le rayon de courbure de 20mm sont les plus proches de la mesure. Pour ce rayon de courbure, les distances dmaxEXPERIMENTAL et dmaxSOV_COMPLET sont quasiment identiques et les écarts observés pour les distances supérieures sont de l’ordre de 2 à 4dB (inclusion de 4mm au-delà de dmax). La courbe amplitude/distance du plan infini calculée avec le modèle SPECULAIRE et le rayon de courbure égal à 20mm est plus proche des résultats expérimentaux par rapport à à la courbe obtenue avec le rayon de 20.5mm. Cependant, il reste un écart entre dmaxEXPERIMENTAL et dmaxSPECULAIRE (Figure 83).
On a par ailleurs comparé les échos de la référence TG avec SOV_COMPLET pour les rayons de courbure de 20 et 21mm (Figure 86 et Figure 87) : la courbe amplitude /distance (Figure 86) et la courbe XY (Figure 87) restent proches de la mesure pour le rayon de courbure de 20mm. Mais la courbe XY simulée avec le rayon de 21mm s’éloigne de la mesure.
Référence TFP
Les écarts importants ne sont pas réduits lorsque les simulations sont réalisées avec le rayon de courbure de 20mm pour lequel les simulations des échos des inclusions avec SOV_COMPLET et du plan infini avec SPECULAIRE étaient plus proches de la mesure que celles réalisées avec un rayon de 20.5mm.
Si à la place du TG on avait choisit le TFP Ø3mm à la profondeur de 5mm comme référence pour les amplitudes, les écarts auraient été beaucoup plus importants : un offset de +6dB (resp +8dB) aurait été noté aux courbes amplitude/distance simulées avec SOV_COMPLET ou SPECULAIRE (resp. SOV). Par conséquent; une étude de caractérisation des réponses de TGs et TFPs des cales d’étalonnage avec des capteurs focalisés est nécessaire.
Synthese
Continuer vers Conclusion
Retour vers Résultats obtenus avec le capteur 5 MHz
Retour vers Capteurs mono-élément