Plusieurs ouvertures actives ont été évaluées sans lois de retards. Elles sont composées de 20, 16, 12, 8, 4, ou 1 élément actif. Les dimensions correspondantes sont les suivantes:
- Ouverture de 20 éléments : 11.9mm x 10mm
- Ouverture de 16 éléments : 9.5mm x 10 mm
- Ouverture de 12 éléments : 7.1mm x 10 mm
- Ouverture de 8 éléments : 4.7mm x 10 mm
- Ouverture de 4 éléments : 2.3mm x 10 mm
- Ouverture de 1 élément : 0.5mm x 10 mm
Référence pour les amplitudes lors des comparaisons mesure/CIVA
- Ouverture de 20 éléments : TG à profondeur 12mm, hauteur d’eau 151mm
- Ouverture de 16 éléments : TG à profondeur 12mm, hauteur d’eau 151mm
- Ouverture de 12 éléments : TG à profondeur 12mm, hauteur d’eau 151mm
- Ouverture de 8 éléments : TG à profondeur 12mm, hauteur d’eau 101mm
- Ouverture de 4 éléments : TG à profondeur 8mm, hauteur d’eau 51mm
- Ouverture de 1 élément : TG à profondeur 8mm, hauteur d’eau 26mm
La référence a été choisie à une hauteur d’eau où les modèles SOV et SOV_COMPLET donnent les mêmes résultats. La comparaison des courbes amplitude/distance obtenues pour chaque ouverture est présentée de Figure 13 à Figure 15. La superposition des signaux expérimental et simulé avec SOV-COMPLET au niveau de la référence est également affichée.
Remarque : La distance minimale acquise correspond à une hauteur d’eau de 1 mm par rapport à la surface de la cale. L’abscisse des courbes échodynamiques correspond donc à la hauteur d’eau de 1mm.
Les prédictions des deux modèles SOV et SOV-COMPLET sont globalement bonnes : l’évolution de l’amplitude de l’écho du TG est bien reproduite. Les écarts en amplitude sont très faibles pour les ouvertures de 1 à 8 éléments et apparaissent en champ lointain (surestimation de 2dB environ).
Pour les ouvertures de 12 à 20 éléments actifs, les mêmes écarts apparaissent en champ lointain. Ils laissent penser à une erreur sur la valeur d’atténuation dans l’eau. Notons l’apport du
nouveau modèle SOV-COMPLET qui améliore l’accord simulation/expérience à certaines hauteurs d’eau pour les ouvertures 16 et 20 éléments (écarts réduits à 2dB).
Dans le cas de la plus grande ouverture, des écarts apparaissent aux très faibles hauteurs d’eau et ne sont pas réduits avec le modèle SOV-COMPLET (écarts de l’ordre de 3 à 4dB). Pour ce cas, des simulations ont été lancées avec des précisions plus importantes (10) mais ne réduisent pas cet écart.
La superposition des A-scans de référence montre une bonne prédiction de la forme du signal.
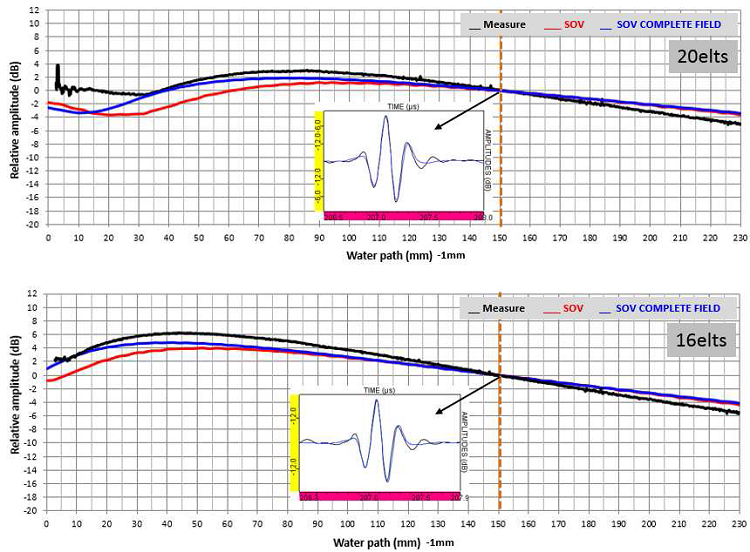
Figure 13 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET, TGØ2mm à 8mm de profondeur. Capteur multiéléments 5MHz,ouvertures de 20 et 16 éléments.
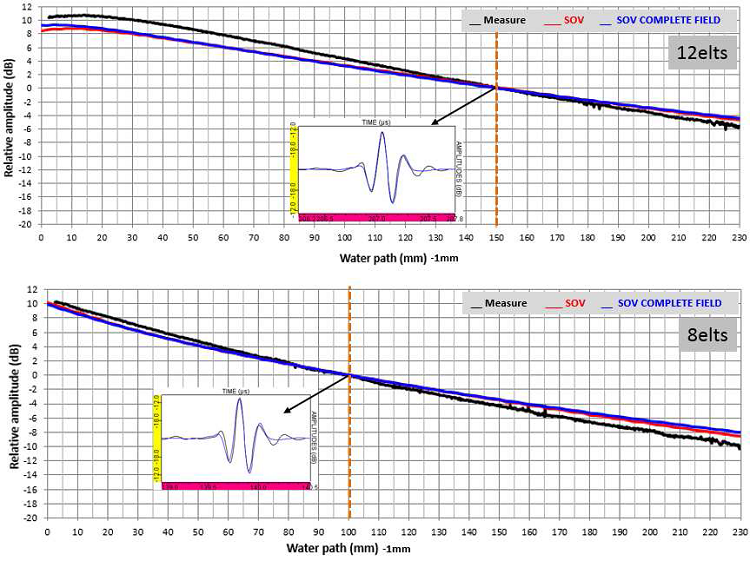
Figure 14 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET, TGØ2mm à 12mm de profondeur. Capteur multiéléments 5MHz,ouvertures de 12 et 8 éléments
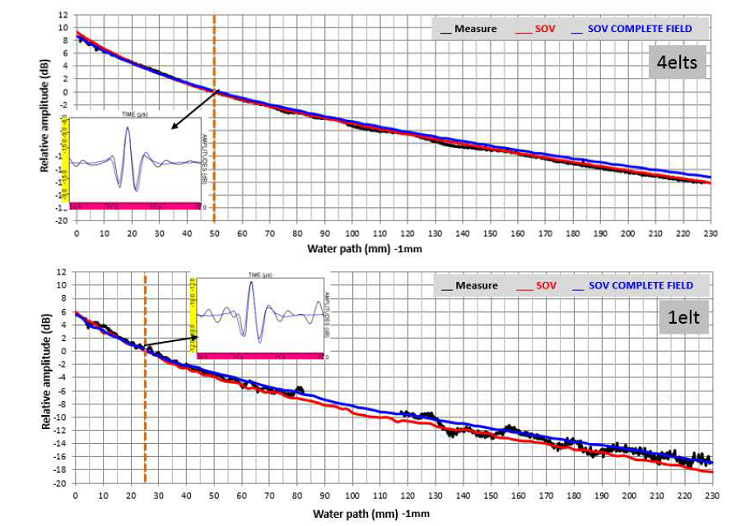
Figure 15 : Comparaison des courbes amplitude/distance mesurées et simulées avec SOV, SOV-COMPLET, TGØ2mm à 12mm de profondeur. Capteur multiéléments 5MHz, ouvertures de 4 et 1 élément.
Remarque : la courbe amplitude/distance expérimentale présente parfois des « trous » (absence de données expérimentales). Ces données ont volontairement été supprimées car elles correspondent à des zones où il y a un mélange entre l’écho spéculaire sur le TG et un écho parasite (écho provenant d’un autre réflecteur, écho fantôme…).
Champ du capteur dans l’eau en fonction de l’ouverture active
La distance capteur-inclusion pour laquelle le maximum d’amplitude du champ émis est obtenu ainsi que les largeurs de faisceau à -3dB sont affichées dans le Tableau 1. Lorsque deux maximas d’amplitude apparaissent, les deux positions sont relevées.
Pour les ouvertures les plus grandes (de 20 à 12 éléments actifs), un seul maximum d’amplitude du champ apparait. Pour les ouvertures plus faibles (de 8 à 1 élément), un second maximum d’amplitude apparait, toujours localisé à la même hauteur d’eau. Ce deuxième maximum d’amplitude, apparaissant pour des ouvertures très différentes dans les deux directions (8 éléments actifs : 4.7 x 10 mm²), est lié à la dimension du capteur dans le plan perpendiculaire (élévation des éléments : 10mm).
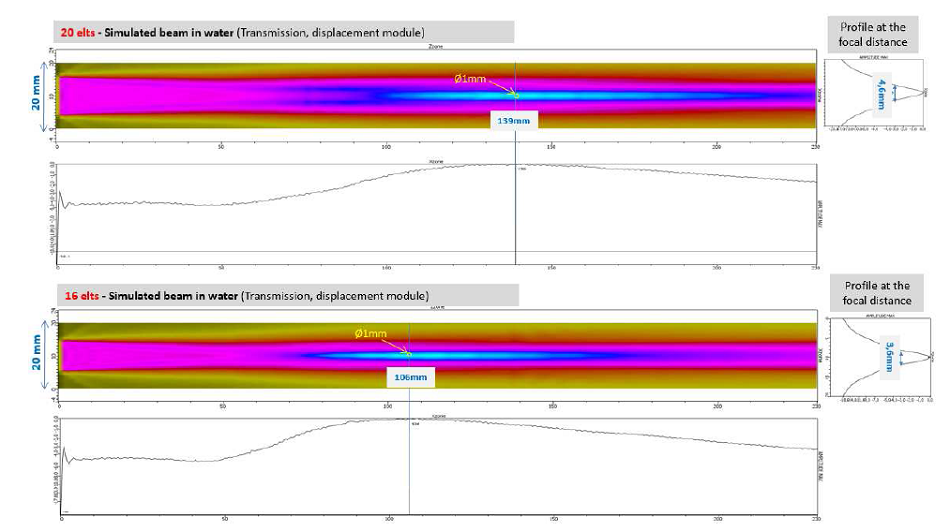
Figure 16 : Simulation avec CIVA du champ émis par 20 et 16 éléments actifs du capteur multiéléments dans l’eau. Capteur multiéléments, 5MHz.
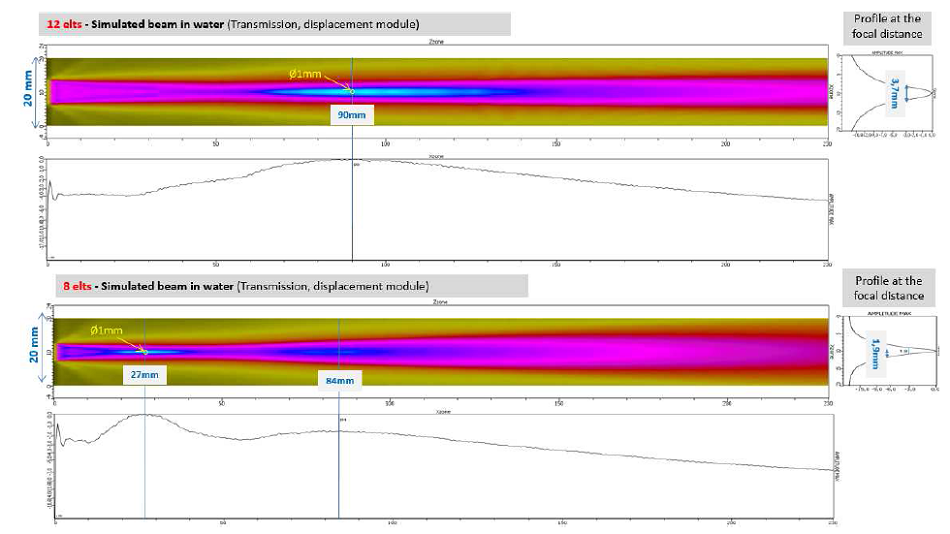
Figure 17 : Simulation avec CIVA du champ émis par 12 et 8 éléments actifs du capteur multiéléments dans l’eau. Capteur multiéléments, 5MHz.
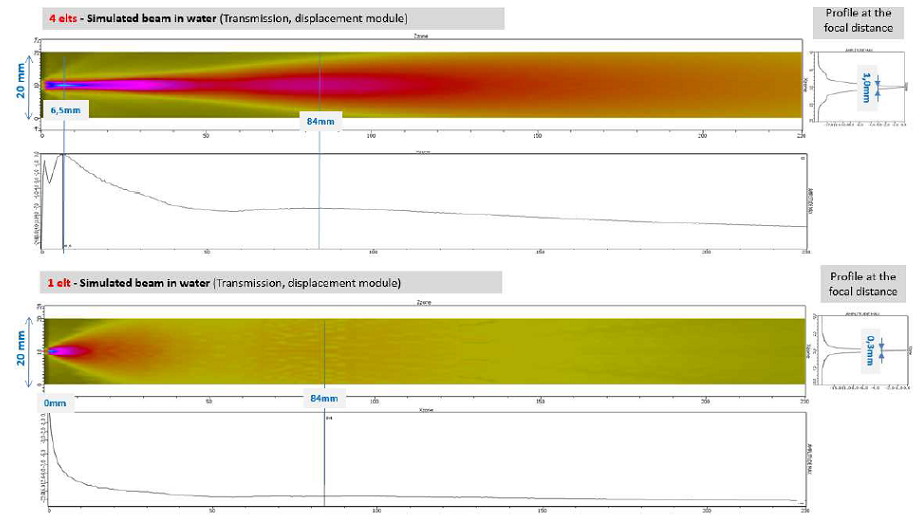
Figure 18 : Simulation avec CIVA du champ émis par 4 et 1 élément actif du capteur multiéléments dans l’eau. Capteur multiéléments, 5MHz.
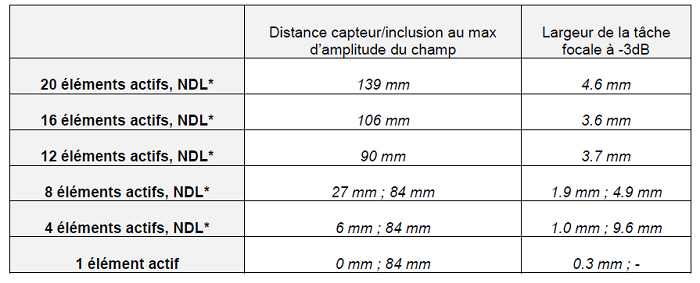
Tableau 1 : Distances capteur/inclusion correspondant au maximum d’amplitude du champ émis dans l’eau sur l’axe du capteur et largeur de la tache focale en fonction de l’ouverture active. Capteur multiéléments avec 20, 16, 12, 8, 4 et 1 éléments actifs, sans loi de retard.
*NDL = Null Delay Law
Résultats obtenus pour l’inclusion en acier
Courbes amplitude/distance
Les comparaisons des courbes amplitude/distance mesurées et simulées avec les trois modèles SOV, SOV-COMPLET et SPECULAIRE sont présentées Figure 19 (ouvertures 20 à 12 éléments) et Figure 20 (ouvertures 8 à 1 élément).
Ouvertures de 20 à 12 éléments
Un très bon accord global est obtenu entre l’expérience et la simulation avec les modèles SOV_COMPLET et SPECULAIRE pour les 3 ouvertures. Les écarts ne dépassent pas 2dB. L’accord entre la mesure et le modèle SOV est moins bon que pour les deux autres modèles lorsque l’inclusion se rapproche du capteur et que l’ouverture du capteur est grande. Les écarts maximums atteignent 4dB environ pour l’ouverture de 20 éléments.
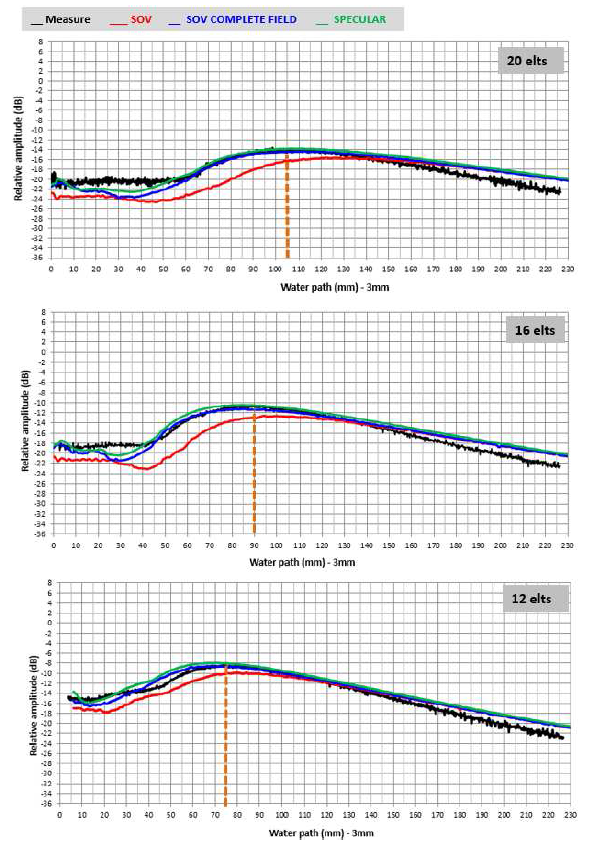
Figure 19 : Comparaison des courbes amplitude/distance mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas des ouvertures de 20, 16 et 12 éléments, sans loi de retards. Capteur multiéléments, 5MHz.
Comme nous l’avions remarqué sur les courbes amplitudes-distance sur les TGs, les amplitudes simulées par CIVA montrent également une tendance à surestimer systématiquement les amplitudes en champ lointain (+2 à +3 dB). Ces écarts peuvent être attribués à une erreur sur la valeur d’atténuation.
La distance « dmax » à laquelle l’amplitude de l’écho est maximale est très bien prédite avec les modèles SOV-COMPLET et SPECULAIRE pour les ouvertures 16 et 20 éléments. Les écarts n’excédent pas 1mm. La position du max est également bien prédite pour l’ouverture 12 éléments même si les écarts s’élèvent à 5mm. Le modèle SOV a en revanche tendance à surestimer dmax de plus de 10mm avec des écarts pouvant atteindre 20mm pour la plus grande ouverture active.
Ouvertures de 8 à 1 éléments
Nous relevons également une bonne prédiction de l’évolution de l’amplitude en fonction de la distance capteur-inclusion avec une prédiction systématique des deux pics d’amplitude. Cependant, les écarts de position de la distance dmax sont importants. CIVA sous-estime la distance. Les écarts peuvent atteindre 13 mm pour l’ouverture de 4 éléments avec le modèle SPECULAIRE.
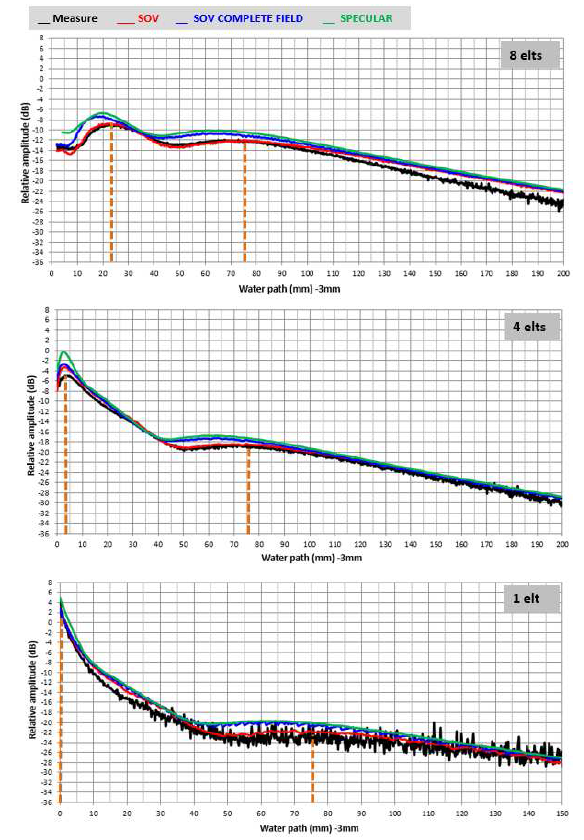
Figure 20 : Comparaison des courbes amplitude/distance mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas des ouvertures de 8, 4 et 1 élément, sans loi de retards. Capteur multiéléments, 5MHz.
Cependant, à la différence des plus grandes ouvertures (de 12 à 20 éléments actifs), c'est le modèle SOV qui est plus proche de l’expérience avec les ouvertures les plus faibles pour prédire la distance dmax et les amplitudes.
Les faibles écarts obtenus avec SOV compartivement aux modèles SOV-COMPLET et SPECULAIRE sont surprenants. Le modèle SOV repose sur des approximations plus fortes que SOV-COMPLET et est donc supposé être moins précis. Afin de comprendre ces résultats, des tests non présentés ici ont été réalisés pour le cas de l’ouverture de 1 élément : le capteur a été découpé en plusieurs sous-éléments afin de réaliser un calcul voie par voie limitant les effets de l’approximation onde plane du modèle SOV. Les résultats obtenus s’approchent de ceux SOV_COMPLET et SPECULAIRE. Le bon accord entre les trois approches suggère que les écarts sont dûs à une hypothèse commune à tous les modèles de CIVA. L’hypothèse « piston » de déplacement homogène à la surface du capteur serait une possibilité. Il est en effet probable que l’hypothèse selon laquelle la surface du capteur est assimilable à un ensemble de sources uniformément réparties, vibrant en phase et avec la même amplitude, soit d'autant plus mise en défaut que la surface de l’élément est faible. L’approximation onde plane du modèle SOV compenserait les effets de cette hypothèse et expliquerait les meilleurs résultats obtenus avec les faibles ouvertures. Cependant, il faut rappeler que l’écart reste acceptable avec les modèles SOV-COMPLET et SPECULAIRE dans le cas d'ouvertures réduites sans application de lois de retards.
Les écarts entre dmaxEXPERIMENTAL et dmaxCIVA sont indiqués dans le Tableau 2. Lorsque deux pics d’amplitude apparaissent, les deux positions sont données.
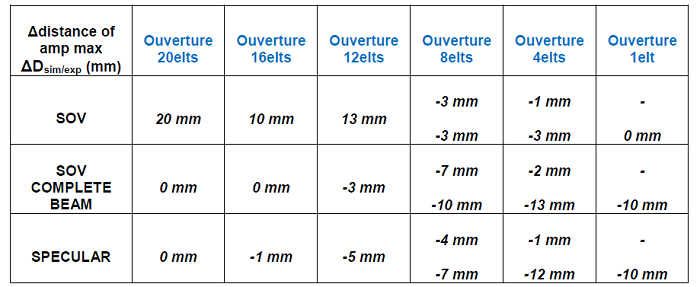
Tableau 2 : Ecarts (en mm) entre les simulations et la mesure pour les distances capteur/inclusion correspondant au maximum d’amplitude émise sur l’axe du capteur avec les modèles SOV, SOV_COMPLET et SPECULAIRE. Capteur multiéléments, loi de retards nulle, 5MHz.
Cartographies dans le plan XY
Les courbes échodynamiques dans le plan XY ont été extraites aux distances auxquelles l’amplitude de la courbe expérimentales amplitude/distance est maximale. Pour les ouvertures où nous observons deux maximas d’amplitude (cas des ouvertures 8, 4 et 1 élément), les extractions ont été faites aux deux hauteurs d’eau correspondantes. De plus, étant donné que les dimensions du capteur sont différentes dans les deux directions, les courbes échodynamiques suivant le plan d’incidence du capteur (axe X) et le plan perpendiculaire au capteur (axe Y) sont affichées.
Les superpositions des courbes expérimentales et simulées avec SOV, SOV_COMPLET et SPECULAIRE sont présentées sur la Figure 21 (cas des ouvertures de 20 à 16 éléments) et de la Figure 22 à Figure 24 pour les ouvertures de 8 à 1 élément. Ces courbes sont normalisées en amplitude (amplitude max = 0 dB) afin de comparer les largeurs focales.
Cas des ouvertures de 20 à 12 éléments :
Les comparaisons expérience/simulations des courbes échodynamiques normalisées en amplitude suivant X et Y montrent un bon accord pour les 3 modèles. Les largeurs focales à -6dB sont bien prédites à +/- 0.5mm près.
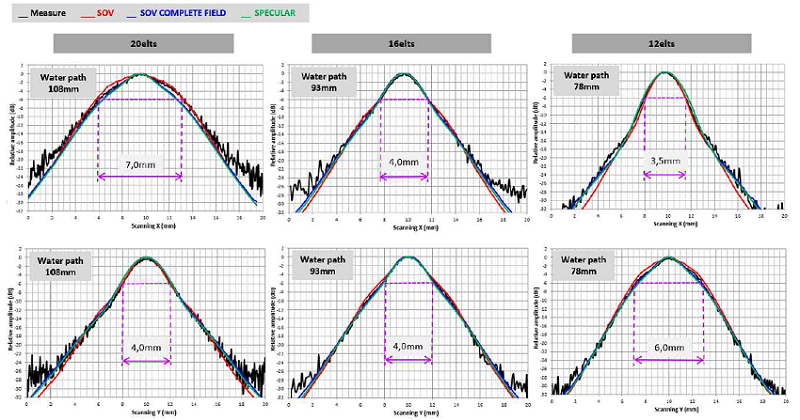
Figure 21 : Comparaison des courbes échodynamiques mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas des ouvertures de 20, 16 et 12 éléments, selon l’axe X et Y. Capteur multiéléments, 5MHz.
Cas de l'ouverture de 8 éléments :
- Suivant l'axe X : Dans le cas de la distance capteur-inclusion de 27 mm, un bon accord est observé entre les courbes échodynamiques expérimentales et simulées avec les 3 modèles. Au niveau du deuxième pic d’amplitude (distance capteur-inclusion de 78 mm), les modèles SPECULAIRE et SOV_COMPLET montrent l’apport d’une approche de type « rayon ». En effet, le modèle SOV a tendance à sous-estimer les amplitudes des échos dès que l’on s’éloigne du centre du capteur.
- Suivant l'axe Y : Les comparaisons montrent que les 3 modèles prédisent des formes échodynamiques semblables et proches de l’expérience sauf pour le modèle SOV à la hauteur d’eau de 78 mm où, à l’inverse de l’extraction suivant X, le modèle a tendance à légèrement surestimer l’amplitude dès que l’on écarte du centre du capteur.
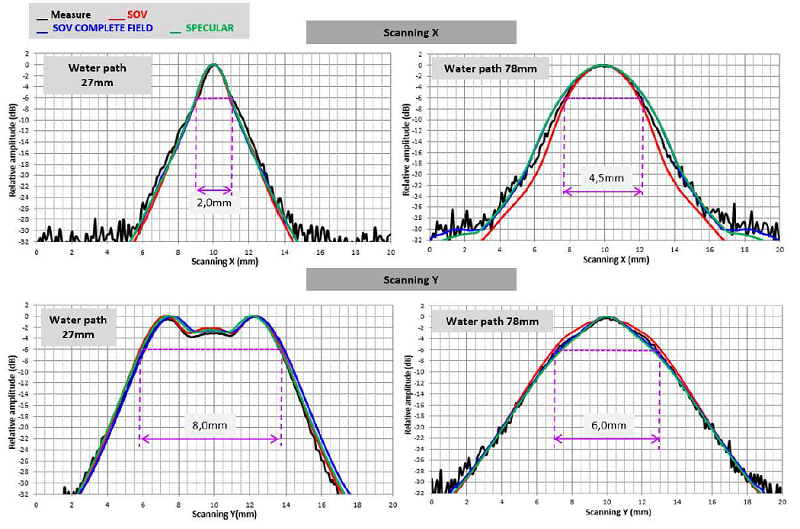
Figure 22 : Comparaison des courbes échodynamiques mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas de l’ouverture de 8 éléments, selon l’axe X et Y. Capteur multiéléments, 5MHz
Cas des ouvertures de 4 et 1 élément :
- Suivant l'axe X : Dans le plan d’incidence du capteur et pour les deux hauteurs d’eau où l’on observe une amplitude maximale, les prédictions de la largeur de tache focale à -6dB s’écartent de l’expérience. Les 3 modèles surestiment l’amplitude dès que l’on s’écarte du centre capteur. Les largeurs focales sont surévaluées jusqu’à +7.5mm pour le modèle SPECULAIRE. Cet écart est toutefois prévisible et peut être associé à l’approximation faite sur le mode de vibration du capteur en mode piston (vitesse particulaire supposée uniforme sur la surface piézo-électrique). Cette approximation est d’autant moins vraie lorsque l’ouverture active est très petite.
Comme dans le cas des courbes amplitude-distance, nous observons un plus faible désaccord avec le modèle SOV par rapport aux deux autres modèles (SOV : +0.5 mm pour la distance capteur-inclusion de 3 mm et +4.5 mm à une distance de 33 mm ; SOV-COMPLET : +1.0 mm pour la distance capteur-inclusion de 3 mm et +7.0 mm à une distance de 33 mm ). Comme précédemment, des tests ont été réalisés et leur résultats sont cohérents avec l’idée que l’approximation onde plane de SOV compense pour ce capteur une erreur liée à l'hypothèse commune à tous les modèles de CIVA.
- Suivant l'axe Y : Pour les 3 modèles évalués, les formes échodynamiques sont très bien prédites aux deux hauteurs d’eau (pas d’écart observé sur les largeurs focales à -6dB).
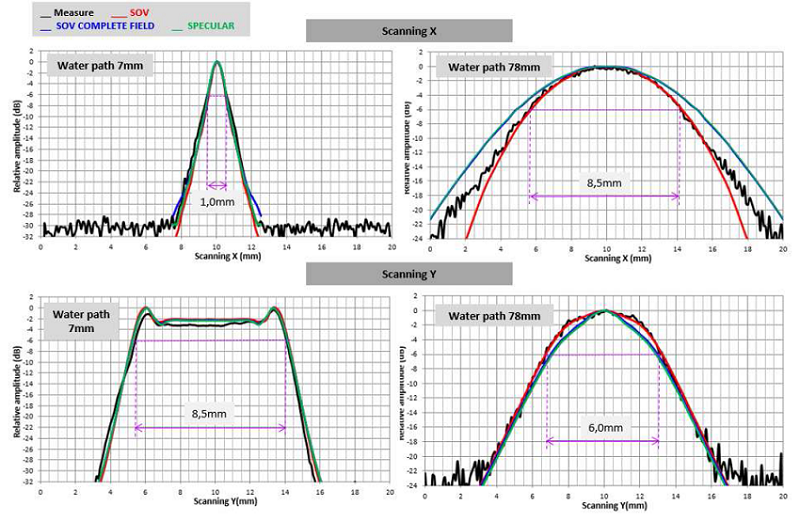
Figure 23 : Comparaison des courbes échodynamiques mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas de l’ouverture de 4 éléments, selon l’axe X et Y. Capteur multiéléments, 5MHz.
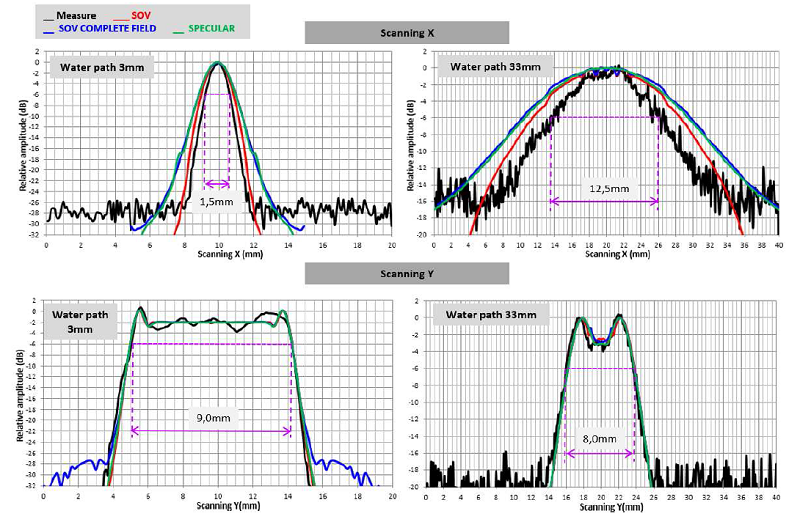
Figure 24 : Comparaison des courbes échodynamiques mesurées et simulées dans l’eau avec SOV, SOVCOMPLET et SPECULAIRE sur une inclusion de 1mm de diamètre, cas de l’ouverture de 1 élément, selon l’axe X et Y. Capteur multiéléments, 5MHz.
Les écarts entre la simulation et l’expérience sur les taches focales sont affichées sur le Tableau 3 pour les échodynamiques suivant le plan d’incidence du capteur, le Tableau 4 pour les échodynamiques suivant le plan perpendiculaire au capteur.
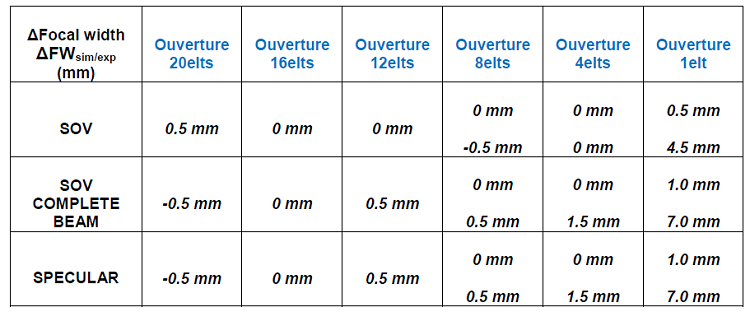
Tableau 3 : Ecarts (en mm) entre les simulations et la mesure pour les taches focales à -6dB suivant X aux distances auxquelles l’amplitude de la courbe amplitude/distance est maximale. Résultats de simulations avec les 3 modèles. Capteur multiéléments, loi de retards nulle, 5MHz.
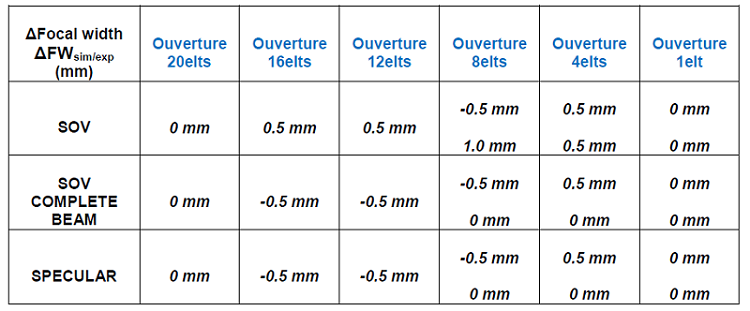
Tableau 4 : Ecarts (en mm) entre les simulations et la mesure pour les taches focales à -6dB suivant Y aux distances auxquelles l’amplitude de la courbe amplitude/distance est maximale. Résultats de simulations avec les 3 modèles. Capteur multiéléments, loi de retards nulle, 5MHz.
Résultats obtenus pour le plan infini
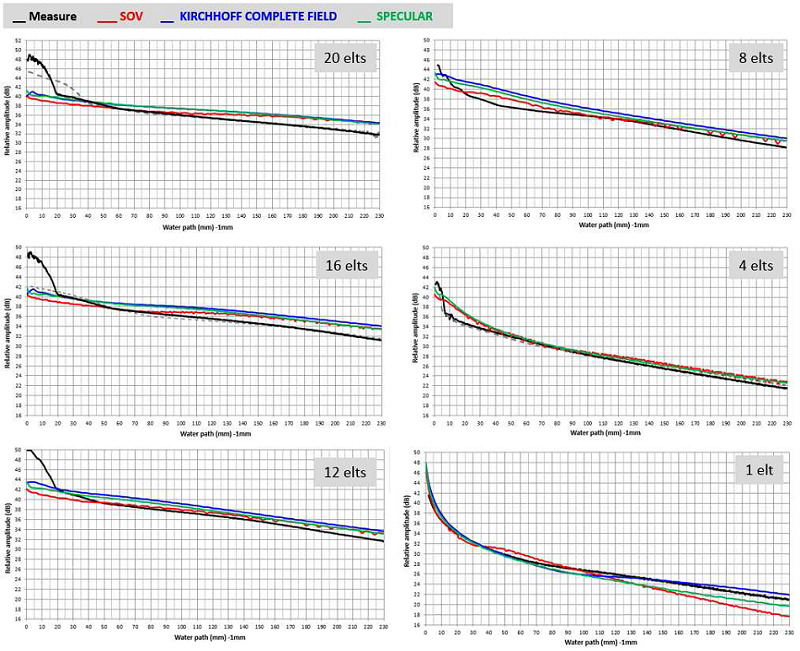
Figure 25 : Comparaison des courbes amplitude/distance mesurée et simulées avec SPECULAIRE,KIRCHHOFF et KIRCHHOFF_COMPLET, cas du plan infini. Capteur multiéléments, loi de retards nulle, 5MHz.
Remarque : à la différence des acquisitions réalisées sur la bille, la hauteur d’eau la plus proche acquise est à 1 mm du plan infini. L’abscisse affichée sur les courbes correspondent donc à la hauteur d’eau moins 1mm.
Les comparaisons des courbes amplitudes/distance expérimentale et simulées montrent globalement une bonne prédiction de l’évolution de l’amplitude en fonction de la hauteur d’eau. En champ lointain, nous observons comme dans les précédentes comparaisons une surestimation de l’ordre de 2/3dB qui peut être associée à une erreur sur la valeur d’atténuation paramétrée dans CIVA.
D’autre part, aux faibles hauteurs d’eau, nous observons expérimentalement une surélévation importante de l’amplitude de l’écho de surface qui n’est pas reproduite par simulation. Des essais expérimentaux réalisés avec un second traducteur, de caractéristiques équivalentes (en pointillé gris sur les courbes 20 éléments et 16 éléments), montrent que cette surélévation est différente et donc probablement liée à des paramètres non maitrisés du capteur.
Dans le cas d’un seul élément actif, nous observons en champ lointain une décroissance plus forte avec le modèle KIRCHHOFF par rapport aux deux autres modèles. La sous-estimation est de l’ordre de 4dB pour une hauteur d’eau de 230mm. La décroissance en amplitude de l’écho du plan infini en fonction de la hauteur d’eau est un peu plus forte également avec le modèle SPECULAIRE même si la sous-estimation à 230mm est de l’ordre de l’incertitude expérimentale. Pour le modèle KIRCHHOFF complet, la décroissance de l’amplitude de l’écho du plan est relativement bien prédite. Les écarts maximums sont inférieurs à 2dB.
Analyse des écarts observés
Effet d’une variation de l’atténuation dans l’eau
L’ensemble des résultats obtenus montre des écarts systématiques entre expérience et simulation en champ lointain. La simulation a tendance à surestimer les amplitudes. Cette tendance peut être associée à une erreur sur la valeur de l’atténuation dans l’eau entrée dans CIVA. Des calculs ont donc été relancés avec une autre valeur d’atténuation. Pour l’évaluation, nous avons sélectionné le cas de l’ouverture de 20 éléments actifs. La valeur de l’atténuation a ainsi été ajustée afin que l’amplitude mesurée sur la référence (TG localisé à 12mm dans la cale de référence) et celle obtenue par simulation soient en bon accord en champ lointain. La valeur obtenue est de 0.02dB/mm (la valeur initiale était de 0.005dB/mm). La courbe amplitude/distance ainsi obtenue sur la référence est présentée Figure 26.
Seuls les résultats obtenus avec SOV-COMPLET sont présentés.
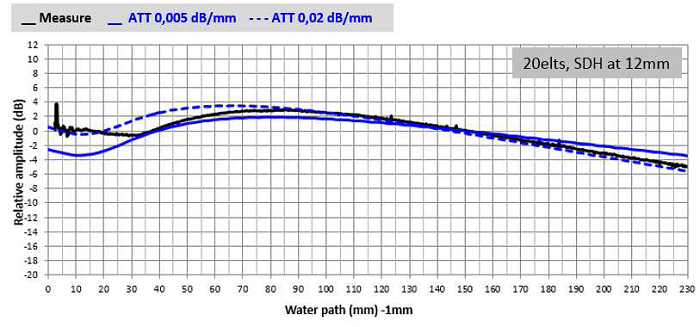
Figure 26 : Superposition des courbes amplitude/distance mesurées et simulées avec SOV-COMPLET avec les atténuations de 0.005dB/mm (littérature) et de 0.02dB/mm, TGØ2mm à 12mm de profondeur dans le bloc d’étalonnage en acier ferritique. Capteur multiéléments 5MHz, ouverture de 20 éléments.
Cette valeur ajustée sur la référence a ensuite été reportée dans le modèle de la simulation sur la bille de 1mm. La courbe amplitude distance ainsi obtenue est présentée Figure 27.
Les résultats montrent un meilleur accord entre la simulation et l’expérience en champ lointain. L’accord est également meilleur aux faibles hauteurs d’eau. Les écarts maximums observés sont inférieurs à 2dB.
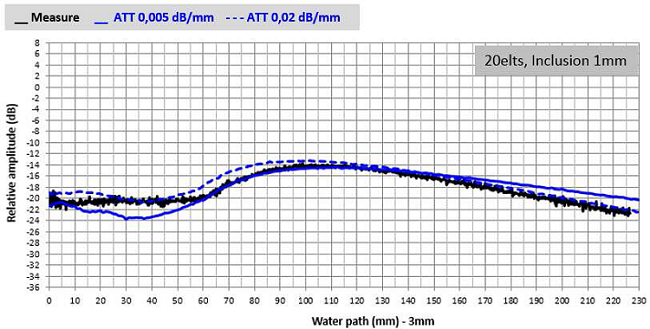
Figure 27 : Superposition des courbes amplitude/distance mesurées et simulées dans l’eau avec SOVCOMPLET sur une inclusion de 1mm de diamètre, atténuations de 0.005dB/mm (littérature) et de 0.02dB/mm. Capteur multiéléments, 5MHz, ouverture de 20 éléments.
Effet d’une faible variation de la fréquence centrale
Son influence n’étant pas négligeable, nous avons évalué l’effet d’une variation de 0.25MHz (5% de la fréquence centrale « fc » de 5MHz utilisée pour les simulations précédentes) sur les résultats de simulations.
Les courbes amplitude/distance calculées avec le modèle SOV_COMPLET pour les 3 fréquences sont représentées Figure 28 (évolution sur le TG de référence à 12mm de profondeur) et Figure 29 (évolution de l’amplitude sur l’inclusion). La référence pour les amplitudes de chaque courbe amplitude/distance obtenue à une fréquence donnée est celle par l’écho du TG obtenu à la même fréquence.
La variation de fréquence centrale entraine une variation des amplitudes des inclusions autour de l’amplitude maximale (d’au plus +/-1dB environ) et de la distance capteur/inclusion correspondant à l’amplitude maximale (de 2mm environ). Ces variations peuvent être considérées comme des incertitudes sur les résultats de simulation CIVA liées à l’incertitude sur la valeur de la fréquence centrale du signal d’entrée.
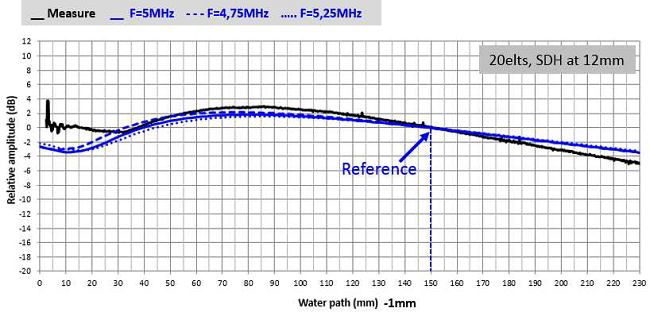
Figure 28: Superposition des courbes amplitude/distance mesurée et simulées avec SOV_COMPLET pour le TGØ2mm à 12mm de profondeur dans le bloc d’étalonnage en acier ferritique. Ces comparaisons montrent que les valeurs et positions des maxima des courbes amplitude/distance dépendent des fréquences centrales du signal d’entrée de 4.75, 5 et 5.25MHz. Capteur multiéléments, 5MHz, ouverture de 20 éléments.
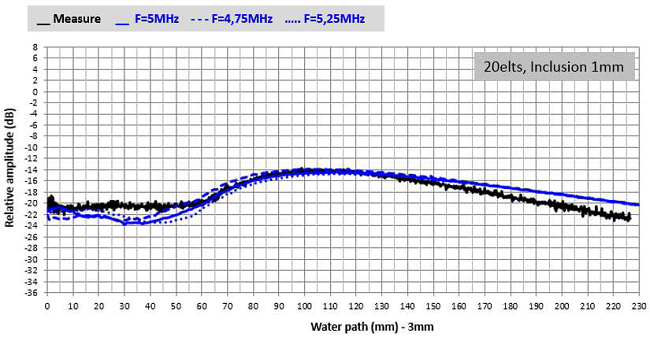
Figure 29: Superposition des courbes amplitude/distance mesurée et simulées avec SOV_COMPLET pour l’inclusion de Ø1mm, . Ces comparaisons montrent que les valeurs et positions des maxima des courbes amplitude/distance dépendent des fréquences centrales du signal d’entrée de 4.75, 5 et 5.25MHz. Capteur multiéléments, 5MHz, ouverture de 20 éléments.
Continuer vers Résultats des configurations avec lois de retards
Retour vers description des simulations
Retour vers Capteur multi-élément